11.5i: Light damping- γ<2ω0



- Last updated
- Aug 8, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Since γ<2ω0, we have to write Equations 11.5.6 as
k1=−12γ+i√ω20−14γ2,k2=−12γ−i√ω20−14γ2.
Further, I shall write
ω′=√w20−14γ2.
Equation 11.5.4 is therefore
x=Ae−12γt+iω′t+Be−12γt−iω′t=e−12γt(Ae+iω′t+Be−iω′t).
If x is to be real, A and B must be complex. Also, since e−iω′t=(eiω′t)* must equal A*, where the asterisk denotes the complex conjugate.
Let A=12(a−ib) and B=12(a+ib) where a and b are real. Then the reader should be able to show that Equation 11.5.9 can be written as
x=e−12γt(acosω′t+bsinω′t).
And if C=√a2+b2,sinα=a√a2+b2,cosα=b√a2+b2, the equation can be written
x=Ce−12γtsin(ω′t+α).
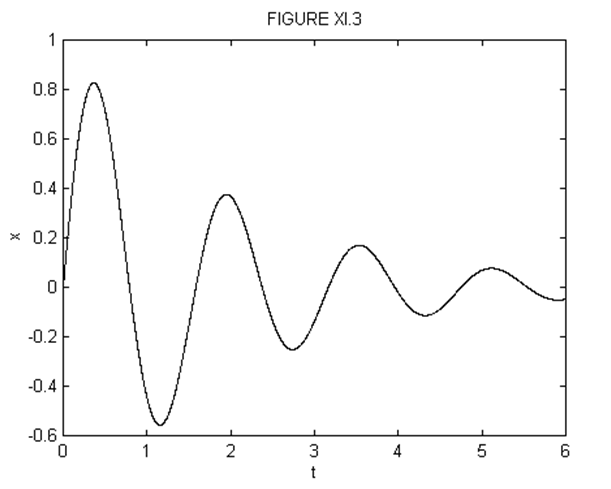
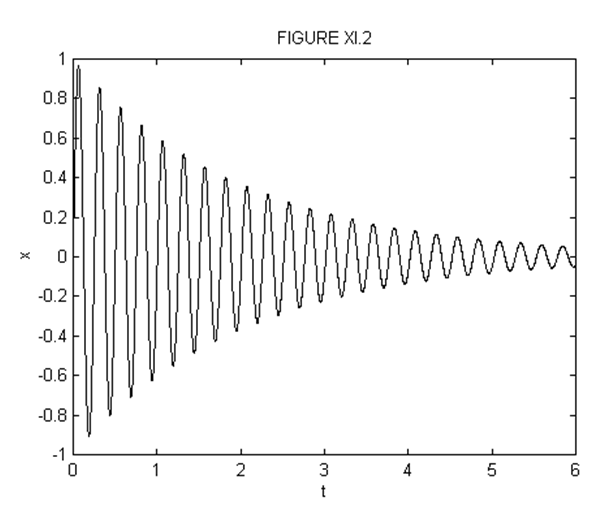
Equations 11.5.9, 11.5.10 or 11.5.11 are three equivalent ways of writing the solution. Each has two arbitrary integration constants (A,B),(a,b) or (C,α), whose values depend on the initial conditions - i.e. on the values of x and ˙x when t=0. Equation 11.5.11 shows that the motion is a sinusoidal oscillation of period a little less than ω0, with an exponentially decreasing amplitude.
To find C and α in terms of the initial conditions, differentiate Equation 11.5.11 with respect to the time in order to obtain an equation showing the speed as a function of the time:
˙x=Ce−12γt[ω′cos(ω′t+α)−12γsin(ω′t+α)].
By putting t=0 in Equations 11.5.11 and 11.5.12 we obtain
x0=Csinα
and
(˙x)0=C(ω′cosα−12γsinα).
From these we easily obtain
cotα=1ω′[(˙x)0˙x0+γ2]
and
C=x0cscα.
The quadrant of α can be determined from the signs of cotα and cscα , C always being positive.
Note that the amplitude of the motion falls off with time as e−12γt, but the mechanical energy, which is proportional to the square of the amplitude, falls off as e−γt.
Figures XI.2 and XI.3 are drawn for C=1,α=0,γ=1. Figure XI.2 has ω0=25γ and hence x=e−12tsin0.24.9949995t, and figure XI.3 has ω0=4γ and hence x=e−12tsin3.968626967t.
Draw displacement : time graphs for an oscillator with m = 0.02 kg, k = 0.08 N m-1, g = 1.5 s-1, t = 0 to 15 s, for the following initial conditions:
- x0=0,(˙x)0=4 ms-1
- (˙x)0=0,x0=3 m
- (˙x)=−2 ms-1, x0=2
Although the motion of a damped oscillator is not strictly "periodic", in that the motion does not repeat itself exactly, we could define a "period" P=2πω′ as the interval between two consecutive ascending zeroes. Extrema do not occur exactly halfway between consecutive zeroes, and the reader should have no difficulty in showing, by differentiation of Equation 11.5.11, that extrema occur at times given by tan(ω′t+α)=2ω′γ. However, provided that the damping is not very large, consecutive extrema occur approximately at intervals of P2. The ratio of consecutive maximum displacements is, then,
|xn||xn+1|=e−12γte−12γ(t+12P).
From this, we find that the logarithmic decrement is
ln(|xn||xn+1|)=Pγ4,
from which the damping constant can be determined.