
3.2: Moment of Force
- Page ID
- 6940

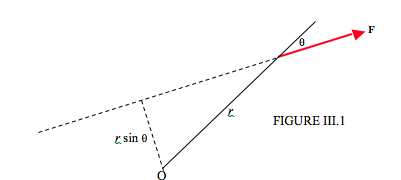
First, let’s look at a familiar two-dimensional situation. In Figure III.1 I draw a force \(\textbf{F}\) and a point O. The moment of the force with respect to O can be defined as
Force times perpendicular distance from O to the line of action of \(\textbf{F}\).
Alternatively, (Figure III.2) the moment can be defined equally well by
Transverse component of force times distance from O to the point of application of the force.
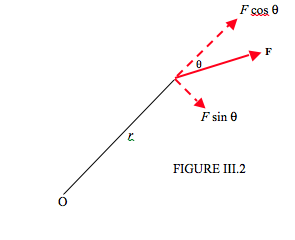
Either way, the magnitude of the moment of the force, also known as the torque, is \(rF \sin\theta\) We can regard it as a vector, \( \boldsymbol\tau \), perpendicular to the plane of the paper:
\begin{equation} \ \boldsymbol\tau = \textbf{r} \times \textbf{F}\tag{3.2.1}\label{eq:3.2.1} \end{equation}
Now let me ask a question. Is it correct to say the moment of a force with respect to (or “about”) a point or with respect to (or “about”) an axis?
In the above two-dimensional example, it does not matter, but now let me move on to three dimensions, and I shall try to clarify.
In Figure III.3, I draw a set of rectangular axes, and a force \(\textbf{F}\), whose position vector with respect to the origin is \(\textbf{r}\).
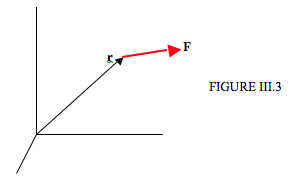
The moment, or torque, of \(\textbf{F}\) with respect to the origin is the vector
\begin{equation} \ \boldsymbol\tau = \textbf{r}\times \textbf{F}\tag{3.2.2}\label{eq:3.2.2} \end{equation}
The \( x-, y-\) and \( z\) -components of \( \boldsymbol\tau \) are the moments of \(\textbf{F}\) with respect to the \(x-, y-\) and z-axes. You can easily find the components of \( \boldsymbol\tau \) by expanding the cross product \( \ref{eq:3.2.2}\):
\[ \boldsymbol\tau = \hat{\textbf{x}}(yF_{z}-zF_{y})+\hat{\textbf{y}}(yF_{x}-xF_{z})+\hat{\textbf{z}}(xF_{y}-yF_{x}) \tag{3.2.3}\label{eq:3.2.3} \]
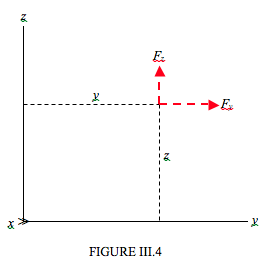
where \( \bf \hat{x},\hat{y},\hat{z}\) are the unit vectors along the \( x,y,z\) axes. In Figure III.4, we are looking down the \( x\)-axis, and I have drawn the components \( F_{y}\) and \( F_{z}\), and you can see that, indeed, \( \tau_{x} =yF_{z}-zF_{y}\).
The dimensions of moment of a force, or torque, are ML2T-2, and the SI units are N m. (It is best to leave the units as N m rather than to express torque in joules.)