
4.E: Nonlinear Systems and Chaos (Exercises)
- Page ID
- 14037

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\)
- Consider the chaotic motion of the driven damped pendulum whose equation of motion is given by
\[{\small \ }\ddot{\phi}+\Gamma \dot{\phi}+\omega _{0}^{2}\sin \phi =\gamma \omega _{0}^{2}\cos \omega t \nonumber\]
for which the Lyapunov exponent is \(\lambda =1\) with time measured in units of the drive period.
- Assume that you need to predict \(\phi \left( t\right)\) with accuracy of \(\ 10^{-2}\) \(radians\), and that the initial value \(\phi \left( 0\right)\) is known to within \(10^{-6}\) \(radians\) . What is the maximum time horizon \(t_{\max }\) for which you can predict \(\phi \left( t\right)\) to within the required accuracy?
- Suppose that you manage to improve the accuracy of the initial value to \(10^{-9}\) \(radians\) (that is, a thousand-fold improvement). What is the time horizon now for achieving the accuracy of \(10^{-2}\) \(radians\)?
- By what factor has \(t_{\max }\) improved with the \( 1000-fold\) improvement in initial measurement.
- What does this imply regarding long-term predictions of chaotic motion?
- A non-linear oscillator satisfies the equation \(\ddot{x}+\dot{ x}^{3}+x=0.\) Find the polar equations for the motion in the state-space diagram. Show that any trajectory that starts within the circle \(r<1\) encircle the origin infinitely many times in the clockwise direction. Show further that these trajectories in state space terminate at the origin.
- Consider the system of a mass suspended between two identical springs as shown.
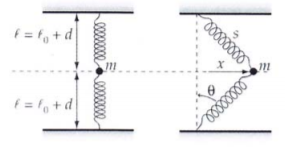
Figure \(\PageIndex{1}\)
If each spring is stretched a distance \(d\) to attach the mass at the equilibrium position the mass is subject to two equal and oppositely directed forces of magnitude \(\kappa d\). Ignore gravity. Show that the potential in which the mass moves is approximately\[U(x)=\left\{ \frac{\kappa d}{l}\right\} x^{2}+\left\{ \frac{\kappa (l-d)}{ 4l^{3}}\right\} x^{4}\]
Construct a state-space diagram for this potential.
- A non-linear oscillator satisfies the equation
\[\ddot{x} + (x^{2}+\dot{x}^{2}-1) \dot{x} + x = 0 \nonumber\]
Find the polar equations for the motion in the state-space diagram. Show that any trajectory that starts in the domain \(1<r<\sqrt{3}\) spirals clockwise and tends to the limit cycle \(r=1\). [The same is true of trajectories that start in the domain \(0<r<1\). ] What is the period of the limit cycle?
- A mass \(m\) moves in one direction and is subject to a constant force \(+F_{0}\) when \(x<0\) and to a constant force \(-F_{0}\) when \(x>0\). Describe the motion by constructing a state space diagram. Calculate the period of the motion in terms of \(m,F_{0}\) and the amplitude \(A\). Disregard damping.
- Investigate the motion of an undamped mass subject to a force of the form \[F(x)= ( \begin{array}{c} -kx\hspace{1.2in}\left\vert x\right\vert <a \\ -(k+\delta )x+\delta a\hspace{0.55in}\left\vert x\right\vert >a \end{array} \nonumber\]