
12.8: Coriolis Force
- Page ID
- 14138

The Coriolis force was defined to be
\[\mathbf{F}_{cor} = -2m\omega \times \mathbf{v}^{\prime\prime}_{rot} \label{12.41}\]
where \(\mathbf{v}^{\prime\prime}\) is the velocity measured in the rotating (double-primed) frame. The Coriolis force is an interesting force; it is perpendicular to both the axis of rotation and the velocity vector in the rotating frame, that is, it is analogous to the \(q\mathbf{v} \times \mathbf{B}\) Lorentz magnetic force.
The understanding of the Coriolis effect is facilitated by considering the physics of a hockey puck sliding on a rotating frictionless table. Assume that the table rotates with constant angular frequency \(\omega = \omega \widehat{\mathbf{k}}\) about the \(z\) axis. For this system the origin of the rotating system is fixed, and the angular frequency is constant, thus \(\mathbf{A}\) and \(\dot{\omega} \times \mathbf{r}^{\prime}\) are zero. Also it is assumed that there are no external forces acting on the hockey puck, thus the net acceleration of the puck sliding on the table, as seen in the rotating frame, simplifies to
\[\mathbf{a}^{\prime\prime}_{rot} = -2\omega \times \mathbf{v}^{\prime\prime}_{rot} − \omega \times (\omega \times \mathbf{r}^{\prime}_{mov}) = −2\omega \widehat{\mathbf{k}} \times \mathbf{v}^{\prime\prime}_{rot} + \omega^2\mathbf{r}^{\prime}_{mov} \label{12.42}\]
The centrifugal acceleration \(+\omega^2\mathbf{r}^{\prime}_{mov}\) is radially outwards while the Coriolis acceleration \(−2\omega \widehat{\mathbf{k}} \times \mathbf{v}^{\prime\prime}_{rot}\) is to the right. Integration of the equations of motion can be used to calculate the trajectories in the rotating frame of reference.
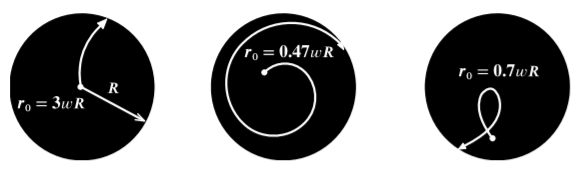
Figure \(\PageIndex{1}\) illustrates trajectories of the hockey puck in the rotating reference frame when no external forces are acting, that is, in the inertial frame the puck moves in a straight line with constant velocity \(\mathbf{v}_0\). In the rotating reference frame the Coriolis force accelerates the puck to the right leading to trajectories that exhibit spiral motion. The apparent complicated trajectories are a result of the observer being in the rotating frame for which that the straight inertial-frame trajectories of the moving puck exhibit a spiralling trajectory in the rotating-frame.
The Coriolis force is the reason that winds circulate in an anticlockwise direction about low-pressure regions in the Earth’s northern hemisphere. It also has important consequences in many activities on earth such as ballet dancing, ice skating, acrobatics, nuclear and molecular rotation, and the motion of missiles.
Example \(\PageIndex{1}\): Accelerating spring plane pendulum
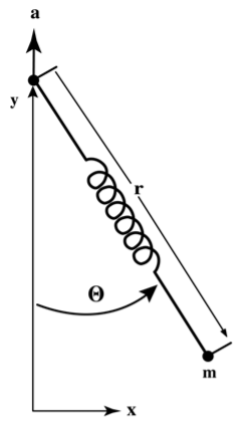
Comparison of the relative merits of using a non-inertial frame versus an inertial frame is given by a spring pendulum attached to an accelerating fulcrum. As shown in the figure, the spring pendulum comprises a mass \(m\) attached to a massless spring that has a rest length \(r_0\) and spring constant \(k\). The system is in a vertical gravitational field \(g\) and the fulcrum of the pendulum is accelerating vertically upwards with a constant acceleration \(a\). Assume that the spring pendulum oscillates only in the vertical \(\theta\) plane.
Inertial frame
This problem can be solved in the fixed inertial coordinate system with coordinates \((x, y)\). These coordinates, and their time derivatives, are given in terms of \(r\) and \(\theta\) by
\[\begin{align*} x & = r\sin\theta \\[4pt] \dot{x} & = \dot{r}\sin\theta + r\dot{\theta}\cos \theta \\[4pt] y & = -r\cos\theta + \frac{1}{2} a t^2 \\[4pt] \dot{y} &= r \dot{\theta} \sin \theta - \dot{r} \cos\theta + at \end{align*}\]
Thus
\[\begin{align*} L &=\frac{1}{2} m\left(\dot{x}^{2}+\dot{y}^{2}\right)-m g y-\frac{1}{2} k\left(r-r_{0}\right)^{2} \\ &=\frac{1}{2} m\left[\dot{r}^{2} + r^{2} \dot{\theta}^{2}+a^{2} t^{2}+2 a t(r \dot{\theta} \sin \theta-\dot{r} \cos \theta)\right] + m g\left(r \cos \theta-\frac{1}{2} a t^{2}\right)-\frac{1}{2} k\left(r-r_{0}\right)^{2}
\end{align*}\]
The Lagrange equations of motion are given by
\[\begin{align*} \Lambda_{r} L &=0 \\[4pt] \ddot{r}-r \dot{\theta}^{2}-(a+g) \cos \theta+\frac{k}{m}\left(r-r_{0}\right) &=0 \\[4pt] \Lambda_{\theta} L&=0 \\[4pt] \ddot{\theta}+\frac{2}{r} \dot{r} \dot{\theta}+\frac{(a+g)}{r} \sin \theta &=0 \end{align*}\]
The generalized momenta are
\[\begin{align*} p_r & = \frac{\partial L}{\partial \dot{r}} \\[4pt] &= m\dot{r} - mat\cos \theta \\ p_{\theta} & = \frac{\partial L}{\partial \dot{\theta}} \\[4pt] &= mr^2 \dot{\theta} + matr \sin \theta \end{align*}\]
These lead to the corresponding velocities of
\[\begin{aligned} \dot{r} & = & \frac{p_r}{m} + at \cos \theta \\ \dot{\theta} & = & \frac{p_{\theta}}{mr^2} - \frac{at \sin \theta}{r} \end{aligned}\]
and thus the Hamiltonian is given by
\[\begin{align*} H & = p_r \dot{r} + p_{\theta} \dot{\theta} − L \\ & = \frac{p^2_r}{2m} + \frac{p_{\theta}}{2mr^2} - \frac{at}{r} p_{\theta} \sin \theta + atp_r \cos \theta + \frac{1}{2} k (r - r_0)^2 + \frac{1}{2} mgat^2 - mgr \cos \theta \end{align*}\]
The Hamilton equations of motion give that
\[\begin{aligned} \dot{r} & = & \frac{\partial H}{\partial p_r} = \frac{p_r}{m} + at \cos \theta \\ \dot{\theta} & = & \frac{\partial H}{\partial p_{\theta}} = \frac{p_{\theta}}{mr^2} − \frac{at \sin \theta}{r} \end{aligned}\]
These radial and angular velocities are the same as obtained using Lagrangian mechanics. The Hamilton equations for \(\dot{p}_r\) and \(\dot{p}_\theta\) are given by
\[\dot{p}_r = −\frac{\partial H}{\partial \theta} = −\frac{at}{r^2} p_{\theta} \sin \theta − k (r − r_0) + mg \cos \theta + \frac{p^2_{\theta}}{mr^3} \nonumber\]
Similarly
\[\dot{p}_{\theta} = −\frac{\partial H}{\partial \theta} = \frac{at}{r} p_{\theta} \cos \theta + atp_r \sin \theta − mgr \sin \theta \nonumber\]
The transformation equations relating the generalized coordinates \(r, \theta\) are time dependent so the Hamiltonian \(H\) does not equal the total energy \(E\). In addition neither the Lagrangian nor the Hamiltonian are conserved since they both are time dependent. The fact that the Hamiltonian is not conserved is obvious since the whole system is accelerating upwards leading to increasing kinetic and potential energies. Moreover, the time derivative of the angular momentum \(\dot{p}_\theta\) is non-zero so the angular momentum \(p_{\theta}\) is not conserved.
Non-inertial fulcrum frame
This system also can be addressed in the accelerating non-inertial fulcrum frame of reference which is fixed to the fulcrum of the spring of the pendulum. In this non-inertial frame of reference, the acceleration of the frame can be taken into account using an effective acceleration \(a\) which is added to the gravitational force; that is, \(g\) is replaced by an effective gravitational force \((g + a)\). Then the Lagrangian in the fulcrum frame simplifies to
\[L_{fulcrum} = \frac{1}{2} m\dot{r}^2 + r^2 \dot{\theta}^2 + m (g + a) (r \cos \theta ) − \frac{1}{2} k (r − r_0)^2 \nonumber\]
The Lagrange equations of motion in the fulcrum frame are given by
\[\begin{aligned} \Lambda_{r} L_{fulcrum}=0 && \\ && \ddot{r}-r \dot{\theta}^{2}-(a+g) \cos \theta+\frac{k}{m}\left(r-r_{0}\right)=0 \end{aligned}\]
\[\begin{aligned} \Lambda_{\theta} L_{fulcrum}=0 && \\ && \ddot{\theta}+\frac{2}{r} \dot{r} \dot{\theta}+\frac{(a+g)}{r} \sin \theta=0 \end{aligned}\]
These are identical to the Lagrange equations of motion derived in the inertial frame.
The \(L_{fulcrum}\) can be used to derive the momenta in the non-inertial fulcrum frame
\[\begin{aligned} \tilde{p}_r & = & \frac{\partial L_{fulcrum}}{\partial \dot{r}} = m\dot{r} \\ \tilde{p}_{\theta} & = & \frac{\partial L_{fulcrumr}}{\partial \dot{\theta}} = mr^2 \dot{\theta} \end{aligned}\]
which comprise only a part of the momenta derived in the inertial frame. These partial fulcrum momenta lead to a Hamiltonian for the fulcum-frame of
\[H_{fulcrum}=\tilde{p}_{r} \dot{r}+\tilde{p}_{\theta} \dot{\theta}-L_{fulcrum}=\frac{\tilde{p}_{r}^{2}}{2 m}+\frac{\tilde{p}_{\theta}}{2 m r^{2}}+\frac{1}{2} k\left(r-r_{0}\right)^{2}-m(g+a) r \cos \theta \nonumber\]
Both \(L_{fulcrum}\) and \(H_{fulcrum}\) are time independent and thus the fulcrum Hamiltonian \(H_{fulcrum}\) is a constant of motion in the fulcrum frame. However, \(H_{fulcrum}\) does not equal the total energy which is increasing with time due to the acceleration of the fulcrum frame relative to the inertial frame. This example illustrates that use of non-inertial frames can simplify solution of accelerating systems.
Example \(\PageIndex{2}\): Surface of rotating liquid
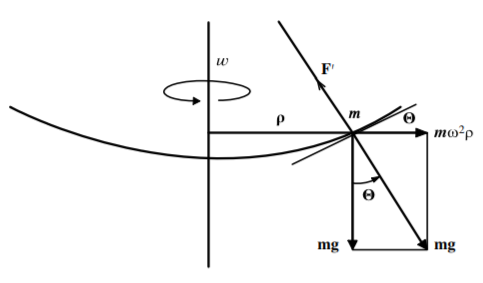
Find the shape of the surface of liquid in a bucket that rotates with angular speed \(\omega\) as shown in the adjacent figure. Assume that the liquid is at rest in the frame of the bucket. Therefore, in the coordinate system rotating with the bucket of liquid, the centrifugal force is important whereas the Coriolis, translational, and transverse forces are zero. The external force
\[\mathbf{F} = \mathbf{F}^{\prime} − m\mathbf{g} \nonumber\]
where \(\mathbf{F}^{\prime}\) is the pressure which is perpendicular to the surface. At equilibrium the acceleration of the surface is zero that is
\[m\mathbf{a}^{\prime\prime} =0= \mathbf{F}^{\prime} + m (\mathbf{g} − \omega \times (\omega \times \mathbf{r}^{\prime} )) \nonumber\]
The effective gravitational force is
\[\mathbf{g}_{eff} = (\mathbf{g} − \omega \times (\omega \times \mathbf{r}^{\prime} )) \nonumber\]
which must be perpendicular to the surface of the liquid since \(\mathbf{F}^{\prime}\) is perpendicular to the surface of a fluid, and the net force is zero. In cylindrical coordinates this can be written as
\[\mathbf{g}_{eff} = −g\widehat{\mathbf{z}} + \rho \omega^2 \widehat{\mathbf{p}} \nonumber\]
From the figure it can be deduced that
\[\tan \theta = \frac{dz}{d\rho} = \frac{\rho \omega^2}{g}\nonumber\]
By integration
\[z = \frac{\omega^2}{2g} \rho^2 + \text{ constant} \nonumber\]
This is the equation of a paraboloid and corresponds to a parabolic gravitational equipotential energy surface. Astrophysicists build large parabolic mirrors for telescopes by continuously spinning a large vat of glass while it solidifies. This is much easier than grinding a large cylindrical block of glass into a parabolic shape.
Example \(\PageIndex{3}\): The pirouette
An interesting application of the Coriolis force is the problem of a spinning ice skater or ballet dancer. Her angular frequency increases when she draws in her arms. The conventional explanation is that angular momentum is conserved in the absence of any external forces which is correct. Thus since her moment of inertia decreases when she retracts her arms, her angular velocity must increase to maintain a constant angular momentum \(\mathbf{L} = I \omega\). But this explanation does not address the question as to what are the forces that cause the angular frequency to increase? The real radial forces the skater feels when she retracts her arms cannot directly lead to angular acceleration since radial forces are perpendicular to the rotation. The following derivation shows that the Coriolis force \(−2m\omega \times \mathbf{v}^{\prime\prime}_{rot}\) acts tangentially to the radial retraction velocity of her arms leading to the angular acceleration required to maintain constant angular momentum.
Consider that a mass \(m\) is moving radially at a velocity \(\dot{r}^{\prime\prime}_{rot}\) then the Coriolis force in the rotating frame is
\[\mathbf{F}_{cor} = −2m\omega \times \mathbf{\dot{r}}^{\prime\prime}_{rot} \nonumber\]
This Coriolis force leads to an angular acceleration of the mass of
\[\dot{\omega} = -\frac{2\omega \times \mathbf{\dot{r}}^{\prime\prime}_{rot}}{r^{\prime\prime}} \label{alpha} \tag{$\alpha$}\]
that is, the rotational frequency decreases if the radius is increased. Note that, as shown in equation \((12.3.11)\), \(\dot{\omega} = \dot{\omega}^{\prime\prime}\). This nonzero value of \(\dot{\omega}\) obviously leads to an azimuthal force in addition to the Coriolis force. Consider the rate of change of angular momentum for the rotating mass \(m\) assuming that the angular momentum comes purely from the rotation \(\omega\). Then in the rotating frame
\[\mathbf{\dot{p}}_{\theta^{\prime\prime}} = \frac{d}{dt} (mr'' ^2 \omega ) = 2mr^{\prime\prime} \dot{r}^{\prime\prime} \omega + mr^{\prime\prime 2} \mathbf{\dot{\omega}} \nonumber\]
Substituting Equation \ref{alpha} for \(\dot{\omega}\) in the second term gives
\[\mathbf{\dot{p}}_{\theta ''} = 2mr^{\prime\prime} \dot{r}^{\prime\prime} \omega - 2mr^{\prime\prime} \dot{r}^{\prime\prime} \omega = 0 \nonumber\]
That is, the two terms cancel. Thus the angular momentum is conserved for this case where the velocity is radial. Note that, since \({p_{\theta}}^{''}\) is assumed to be colinear with \(\omega\), then it is the same in both the stationary and rotating frames of reference and thus angular momentum is conserved in both frames. In addition, in the fixed frame, the angular momentum is conserved if no external torques are acting as assumed above.
Note that the rotational energy is
\[E_{rot} = \frac{1}{2} I \omega^2 \nonumber\]
Also the angular momentum is conserved, that is
\[\mathbf{p}_{\theta} = I\omega = I \hat{\omega} \nonumber\]
Substituting \(\omega = \frac{p_{\theta}}{I}\) in the rotational energy gives
\[E_{rot} = \frac{p^{2}_{\theta}}{2I} = \frac{l^2}{2I} \nonumber\]
Therefore the rotational energy actually increases as the moment of inertia decreases when the ice skater pulls her arms close to her body. This increase in rotational energy is provided by the work done as the dancer pulls her arms inward against the centrifugal force.