
14.4: Center of Mass Oscillations
- Page ID
- 9638

Transforming the coordinates into the center of mass of the two oscillating masses elucidates an interesting feature of the normal modes for the two-coupled linear oscillator. As illustrated in Figure \((14.2.1)\), the center-of-mass coordinate for the two mass system is
\[\begin{align*} 2R_{cm} &= l + x_1 + l + l^{\prime} + x_2 \\[4pt] &= 2l + l^{\prime} + \eta_2 \end{align*}\]
while the relative separation distance is
\[r = (l + l^{\prime} + x_2) − (l + x_1) = l^{\prime} − \eta_1\notag\]
That is, the two normal modes are
\[\begin{align} \eta_1 = l^{\prime} − r \\ \eta_2 = 2 R_{cm} − 2l − l^{\prime} \notag\end{align}\]
The \(\eta_1\) mode, which has angular frequency \(\omega_1 = \sqrt{\frac{\kappa +2\kappa^{\prime}}{M}}\) corresponds to an oscillations of the relative separation \(r\), while the center-of-mass location \(R_{cm}\) is stationary. By contrast, the \(\eta_2\) mode, with angular frequency \(\omega_2 = \sqrt{\frac{\kappa}{M}}\) corresponds to an oscillation of the center of mass \(R_{cm}\) with the relative separation \(r\) being a constant.
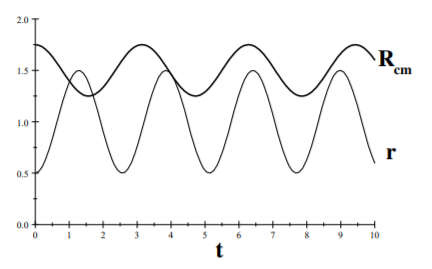
Figure \(\PageIndex{1}\) illustrates the decoupled center-of-mass \(R_{cm}\), and relative motions \(r\) for both normal modes of the coupled double-oscillator system. The difference in angular frequencies and amplitudes is readily apparent. It is of interest to consider the special case where the spring constant \(\kappa = 0\) for the two outside springs. Then the angular frequencies are \(\omega_1 = \sqrt{\frac{2\kappa^{\prime}}{M}}\) and \(\omega_2 = 0\) for the two normal modes. When \(\kappa = 0\) the \(\eta_2\) mode is a spurious center-of-mass mode since it corresponds to an oscillation with \(\omega_2 = 0\) in spite of the fact that there are no forces acting on the center of mass. That is, the center-of-mass momentum must be a constant of motion. This spurious center-of-mass oscillation is a consequence of measuring the displacements \((x_1, x_2)\) with respect to an arbitrary external reference that is not related to the center of mass of the coupled system. Spurious center-of-mass modes are encountered frequently in many-body coupled oscillator systems such as molecules and nuclei. In such cases it is necessary to project out the center-of-mass motion to eliminate such spurious solutions as will be discussed later.