
3.5: The Velocity and Acceleration Vectors
- Page ID
- 3436

Learning Objectives
- Explain the velocity vector and the acceleration vector
The Velocity Vector
In a freshman course in Newtonian mechanics, we would define a vector as something that has three components. Furthermore, we would require it to transform in a certain way under a rotation. For example, we could form the collection of numbers \((e,\: T,\: DJIA)\), where \(e\) is the fundamental charge, \(T\) is the temperature in Buffalo, New York, and \(DJIA\) measures how the stock market is doing. But this would not be a vector, since it doesn’t act the right way when rotated (this particular “vector” is invariant under rotations). Figure \(\PageIndex{1}\) gives a less silly non-example. In contradistinction to a vector, a scalar is specified by a single real number and is invariant under rotations.

The most basic example of a Newtonian vector was a displacement \((∆x, ∆y, ∆z)\), and from the displacement vector we would go on to construct other quantities such as a velocity vector \(v = ∆r/∆t\). This worked because in Newtonian mechanics \(∆t\) was treated as a scalar, and dividing a vector by a scalar produces something that again transforms in the right way to be a vector.
Now let’s upgrade to relativity, and work through the same steps by analogy. When I say “vector” in this book, I mean something that in \(3+1\) dimensions has four components. This can also be referred to as a four-vector. Our only example so far has been the spacetime displacement vector \(∆r = (∆t, ∆x, ∆y, ∆z)\). This vector transforms according to the Lorentz transformation. In general, we require as part of the definition of a (four-)vector that it transform in the usual way under both rotations and boosts (Lorentz transformations). We might now imagine that the next step should be to construct a velocity four-vector \(∆r/∆t\). But relativistically, the quantity \(∆r/∆t\) would not transform like a vector, e.g., if \(r\) was spacelike, then there would be a frame in which we had \(∆t = 0\), and then \(∆r/∆t\) would be finite in some frames but infinite in others, which is absurd.
To construct a valid vector, we have to divide \(∆r\) by a scalar. The only scalar that could be relevant would be the proper time \(\Delta \tau\), and this is indeed how the velocity vector is defined in relativity. For an inertial world-line (one with constant velocity), we define \(v = ∆r/∆\tau\). The generalization to noninertial world-lines requires that we make this definition into a derivative:
\[v = \dfrac{dr}{d\tau}\]
Not all objects have well-defined velocity vectors. For example, consider a ray of light with a straight world-line, so that the derivative \(d. . . / d. . . \)is the same as the ratio of finite differences \(∆ . . . /∆ . . .\), i.e., calculus isn’t needed. A ray of light has \(v = c\), so that applying the metric to any segment of its world-line gives \(∆\tau = 0\). Attempting to calculate \(v = ∆r/∆\tau \) then gives something with infinite components. We will see in section 4.3 that all massless particles, not just photons, travel at \(c\), so the same would apply to them. Therefore a velocity vector is only defined for particles whose world-lines are timelike, i.e., massive particles.
Example \(\PageIndex{1}\): Velocity vector of an object at rest
An object at rest has \(v = (1, 0)\). The first component indicates that if we attach a clock to the object with duct tape, the proper time measured by the clock suffers no time dilation according to an observer in this frame, \(dt/ d\tau = 1\). The second component tells us that the object’s position isn’t changing, \[dx/ dτ = 0\]
The Acceleration Vector
The acceleration vector is defined as the derivative of the velocity vector with respect to proper time,
\[a = dv /d\tau.\]
It measures the curvature of a world-line. Its squared magnitude is the minus the square of the proper acceleration, meaning the acceleration that would be measured by an accelerometer carried along that world-line. The proper acceleration is only approximately equal to the magnitude of the Newtonian acceleration three-vector, in the limit of small velocities.
Example \(\PageIndex{2}\): Constant proper acceleration
Suppose a spaceship moves so that the acceleration is judged to be the constant value a by an observer on board. Find the motion \(x(t)\) as measured by an observer in an inertial frame.
Solution
Let \(τ\) stand for the ship’s proper time, and let dots indicate derivatives with respect to \(τ\). The ship’s velocity has magnitude \(1\), so
\[\dot{t}^2 - \dot{x}^2 = 1 \nonumber\]
An observer who is instantaneously at rest with respect to the ship judges is to have an acceleration vector \((0, a)\) (because the low-velocity limit applies). The observer in the \((t, x)\) frame agrees on the magnitude of this vector, so
\[\ddot{t}^2 - \ddot{x}^2 = -a^2 \nonumber\]
The solution of these differential equations is
\[t = \dfrac{1}{a} \sinh aτ \nonumber\]
and
\[x = \dfrac{1}{a} \cosh aτ \nonumber\]
(choosing constants of integration so that the expressions take on their simplest forms). Eliminating \(τ\) gives
\[x = \frac{1}{a}\sqrt{1 + a^2 t^2} \nonumber\]
shown in figure \(\PageIndex{2}\). The world-line is a hyperbola, and this type of motion is sometimes referred to as hyperbolic motion.
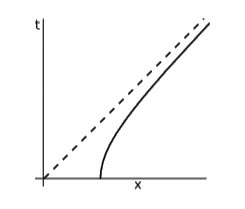
As \(t\) approaches infinity, \(dx/dt\) approaches the speed of light. In the same limit, \(x\) increases exponentially with proper time, so that surprisingly large distances can in theory be traveled within a human lifetime.
Another interesting feature of this problem is the dashed-line asymptote, which is lightlike. Suppose we interpret this as the world-line of a ray of light. The ray comes closer and closer to the ship, but will never quite catch up. Thus provided that the rocket never stops accelerating, the entire region of spacetime to the left of the dashed line is forever hidden from its passengers. That is, an observer who undergoes constant acceleration has an event horizon — a boundary that prevents her from observing anything on the other side. You may have heard about the event horizon associated with a black hole. This example shows that we can have event horizons even when there is no gravity at all.
Constraints on the velocity and acceleration vectors
Counting degrees of freedom
There is something misleading about the foregoing treatment of the velocity and acceleration vectors, and the easiest way to see this is by introducing the idea of a degree of freedom. Often we can describe a system using a list of real numbers. For the hand on a clock, we only need one number, such as \(3\) o’clock. This is because the hand is constrained to stay in the plane of the clock’s face and also to keep its tail at the center of the circle. Since one number describes its position, we say that it has one degree of freedom. If a hiker wants to know where she is on a map, she has two degrees of freedom, which could be specified as her latitude and longitude. If she was in a helicopter, there would be no constraint to stay on the earth’s surface, and the number of degrees of freedom would be increased to three. If we also considered the helicopter’s velocity to be part of the description of its state, then there would be a total of six degrees of freedom: one for each coordinate and one for each component of the velocity vector.
Now suppose that we want to specify a particle’s velocity and acceleration. In Newtonian mechanics, we would describe these three vectors as possessing a total of six degrees of freedom: \(vx, vy, vz, ax, ay\), and \(az\). Upgrading from Newtonian mechanics to relativity can’t change the number of degrees of freedom. For example, an electron’s acceleration is fully determined by the force we exert on it, and we might control that acceleration by placing a proton nearby and producing an electrical attraction. The position of the proton (three degrees of freedom for its three coordinates) determines the electron’s acceleration, so the acceleration has exactly three degrees of freedom as well.
This means that there must be some hidden redundancy in the eight components of the velocity and acceleration four-vectors. The system only has six degrees of freedom, so there must be two constraints that we didn’t know about. Similarly, I’ve gone hiking and had my GPS unit claim that I was a thousand feet above a lake or three thousand feet under a mountain. In those situations there was a constraint that I knew about but that the GPS didn’t: that I was on the surface of the earth.
Normalization of the velocity
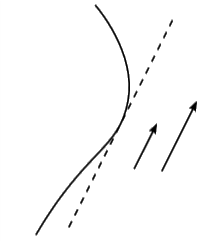
The first constraint arises naturally from a geometrical interpretation of the velocity four-vector, shown in Figure \(\PageIndex{3}\). The curve represents the world-line of a particle. The dashed line is drawn tangent to the world-line at a certain moment. Under a microscope, the dashed line, which represents a possible inertial motion of a particle, is indistinguishable from the solid curve, which is noninertial. The dashed line has a slope \(∆t/∆x = 2\), which corresponds to a velocity \(∆x/∆t = 1/2\). The figure is drawn in \(1 + 1\) dimensions, but in \(3 + 1\) dimensions we would want to know more than this number. We would want to know the orientation of the dashed line in the three spatial dimensions, i.e., not just the speed of the particle but also its direction of motion. All the desired information can be encapsulated in a vector. Both of the vectors shown in the figure are parallel to the dashed line, so even though they have different lengths, there is no difference between the velocities they represent. Since we want the particle to have a single well-defined vector to represent its velocity, we want to pick one vector from among all the vectors parallel to the dashed line, and call that “the” velocity vector.
We have already implicitly made this choice. It follows from the original definition \(v = dr/ dτ\) that the velocity vector’s squared magnitude \(v^2 = v\cdot v\) is always equal to \(1\), even though the object whose motion it describes is not moving at the speed of light. This, along with the requirement that the velocity vector lie within the future rather than the past light cone, uniquely specifies which tangent vector we want. The requirement \(v^2 = 1\) is an example of a recurring idea in physics and mathematics called normalization. The idea is that we have some object (a vector, a function, . . . ) that could be scaled up or down by any amount, but from among all the possible scales, there is only one that is the right one. For example, a gambler might place a horse’s chance of winning at \(9\) to \(1\), but a physicist would divide these by \(10\) in order to normalize the probabilities to \(0.9\) and \(0.1\), the idea being that the total probability should add up to \(1\). Our definition of the velocity vector implies that it is normalized. Thus an alternative, geometrical definition of the velocity vector would have been that it is the vector that is tangent to the particle’s world-line, future-directed, and normalized to \(1\).
When we hear something referred to as a “vector,” we usually take this is a statement that it not only transforms as a vector, but also that it adds as a vector. But the sum of two velocity vectors would not typically be a valid velocity vector at all, since it would not have unit magnitude. This lack of additivity would in any case have been expected because velocities don’t add linearly in relativity (section 3.3).
Exercise \(\PageIndex{1}\)
Velocity vectors are required to have \(v^2 = 1\). If a vector qualifies as a valid velocity vector in some frame, could it be invalid in another frame?
A nice way of thinking about velocity vectors is that every such vector represents a potential observer. That is, the velocity vectors are the observer-vectors \(o\) of chapter 1, but with a normalization requirement \(o^2 = 1\) that we did not impose earlier. An observer writes her own velocity vector as \((1, 0)\), i.e., as the unit vector in the timelike direction. Since we have no notion of adding one observer to another observer, it makes sense that velocity vectors don’t add relativistically. Similarly, there is no meaningful way to define the magnitude of an observer, so it makes sense that the magnitude of a velocity vector carries no useful information and can arbitrarily be set equal to 1.
Regarding the magnitude, note also that the magnitude of a vector is frame-invariant, and therefore it wouldn’t make sense to imagine that the magnitude of an object’s four-velocity would produce some number telling you how fast the object was going. How fast relative to what?
If \(u\) and \(v\) are both future-directed, properly normalized velocity vectors, and if the signature is \(+ - --\) as in this book, then their inner product is \(\gamma = u\cdot v\), the gamma factor, introduced in section 1.3, corresponding their relative velocity.
Orthogonality of the velocity and acceleration
Now for the second of the two constraints deduced above:
Suppose an observer claims that at a certain moment in time, a particle has \(v = (1, 0)\) and \(a = (3, 0)\). That is, the particle is at rest \((v_x = 0)\) and its \(v_t\) is growing by \(3\) units per second. This is impossible, because after an infinitesimal time interval \(dt\), this rate of change will result in \(v = (1 + 3 dt, 0)\), which is not properly normalized: its magnitude has grown from \(1\) to \(1+3 dt\). The observer is mistaken. This is not a possible combination of velocity and acceleration vectors. In general, we always have the following constraint on the velocity and acceleration vectors:
\[a\cdot v = 0\]
This is analogous to the three-dimensional idea that in uniform circular motion, the perpendicularity of the velocity and acceleration three-vectors is what causes the velocity vector to rotate without changing its magnitude.