
4.1: Center of Mass
- Page ID
- 17382

Center of Mass of a Collection of Particles
So far we’ve only considered two cases - single particles on which a force is acting (like a mass on a spring), and pairs of particles exerting a force on each other (like gravity). What happens if more particles enter the game? Well, then we have to calculate the total force, by vector addition, and total energy, by regular addition. Let’s label the particles with a number \(\alpha\), then the total force is given by:
\[F_{\text { total }}=\sum_{\alpha} \boldsymbol{F}_{\alpha}=\sum_{\alpha} m_{\alpha} \ddot{r}_{\alpha}=M \frac{\mathrm{d}^{2}}{\mathrm{d} t^{2}}\left(\frac{\sum_{\alpha} m_{\alpha} r_{\alpha}}{M}\right)=M \frac{\mathrm{d}^{2}}{\mathrm{d} t^{2}} r_{\mathrm{cm}}\]
where we’ve defined the total mass \(\sum_\alpha m_\alpha\) and the center of mass \[r_{\mathrm{cm}}=\frac{1}{M} \sum_{\alpha} m_{\alpha} r_{\alpha} \label{cntrofmass}\]
Center of Mass of an Object
Equation (\ref{cntrofmass}) gives the center of mass of a discrete set of particles. Of course, in the end, every object is built out of a discrete set of particles, its molecules, but summing them all is going to be a lot of work. Let’s try to do better. Consider a small sub-unit of the object of volume dV(much smaller than the object, but much bigger than a molecule). Then the mass of that sub-unit is \(dm=\rho dV\), where \(\rho\) is the density (mass per unit volume) of the object. Summation over all these masses gives us the center of mass of the object, by Equation (\ref{cntrofmass}). Now taking the limit that the volume of the sub-units goes to zero, this becomes an infinite sum over infinitesimal volumes - an integral. So for the center of mass of a continuous object we find:
\[r_{\mathrm{cm}}=\frac{1}{M} \int_{V} \rho \cdot r \mathrm{d} V \label{intcm}\]
Note that in principle we do not even need to assume that the density \(\rho\) is constant - if it depends on the position in space, we can also absorb that in the discussion above, and end up with the same equation, but now with \(\rho (r)\). That will make the integral a lot harder to evaluate, but not necessarily impossible. Also note that the total mass M of the object is simply given by \(\rho \cdot V\), where V is the total volume, if the density is constant, and by \(\int_V \rho (r) dV\) otherwise. Therefore, if the density is constant, it drops out of Equation (\ref{intcm}), and we can rewrite it as
\[r_{\mathrm{cm}}=\frac{1}{V} \int_{V} r \mathrm{d} V \quad \text { for constant density } \rho\]
Unfortunately, many textbooks introduce the confusing concept of a infinitesimal mass element dm, instead of a volume element dV with mass \(\rho dV\). This strange habit often throws students off, and the concept is wholly unnecessary, so we won’t adapt it here.
Equation (\ref{intcm}) holds for any continuous object, but it might be confusing if you consider a linear or planar object - as you may wonder how the density \(\rho\) and volume element dV are defined in one and two dimensions. There are two ways out. One is to say that all physical objects are three-dimensional - even a very thin stick has a cross section. If you say that cross section has area A (which is constant along the stick, or the thin stick approximation would be invalid), and the coordinate along the stick is x, the volume element simply becomes dV=Adx, and the integral in Equation (\ref{intcm}) reduces to a one-dimensional integral. You can approach two-dimensional objects in the same way, by giving them a small thickness \(\delta z\) and writing the volume element as \(dV=\delta z dA\). Alternatively, you can define one- and two-dimensional analogs of the density: the mass per unit length \(\lambda\) and mass per unit area \(\sigma\), respectively. With those, the one- and two-dimensional equivalents of equation (\ref{intcm}) are given by
\[x_{\mathrm{cm}}=\frac{1}{M} \int_{0}^{L} \lambda x \mathrm{d} x, \text { and } r_{\mathrm{cm}}=\frac{1}{M} \int_{A} \rho \cdot r \mathrm{d} A \label{xcmrcm}\]
where M is still the total mass of the object.
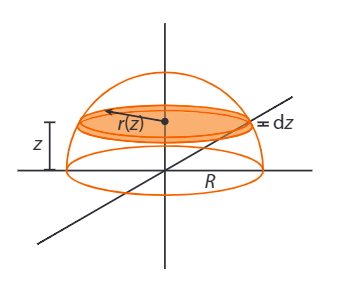
4.1.3. Worked example: center of mass of a solid hemisphere
Solution
By symmetry, the center of mass of a solid sphere must lie at its center. The center of mass of a hemisphere cannot be guessed so easily, so we must calculate it. Of course, it must still lie on the axis of symmetry, but to calculate where on that axis, we’ll use Equation \ref{xcmrcm}. To carry out the integral, we’ll make use of the symmetry the system still has, and chop our hemisphere up into thin slices of equal thickness dz, see Figure 4.1.1. The volume of such a slice will then depend on its position z, and be given by \(\mathrm{d} V=\pi r(z)^{2} \mathrm{d} z\), where r(z) is the radius at height z. Putting the origin at the bottom of the hemisphere, we easily obtain \(r(z)=\sqrt{R^{2}-z^{2}}\), where R is the radius of the hemisphere. The position vector r in Equation \ref{xcmrcm} simply becomes (0, 0, z), so we get:
\[z_{\mathrm{cm}}=\frac{1}{\frac{2}{3} \pi R^{3}} \int_{0}^{R} z \pi\left(R^{2}-z^{2}\right) \mathrm{d} z=\frac{3}{2 R^{3}}\left[\frac{1}{2} z^{2} R^{2}-\frac{1}{4} z^{4}\right]_{0}^{R}=\frac{3}{8} R\]
The center of mass of the solid hemisphere thus lies at \(r_{cm}=(0, 0, \frac{3R}{8})\)