
9.8: Examples
- Page ID
- 22417

This was a long chapter, in part because it contains a number of useful worked-out examples; so please make sure not to overlook them! Section 9.2 showed a couple of examples of problems that can be solved using conservation of angular momentum. Section 9.3 shows you how to set up and solve the equilibrium equations for a leaning ladder, which is the archetype of all statics problems; and Section 9.4 also solves for you the problem of a generic object rolling down an inclined plane.
The first couple of additional examples in this section show you have to set up and solve the equations of motion for somewhat more complicated systems, and you should study them carefully.
Example \(\PageIndex{1}\): Torques and forces on the wheels of an accelerating bicycle
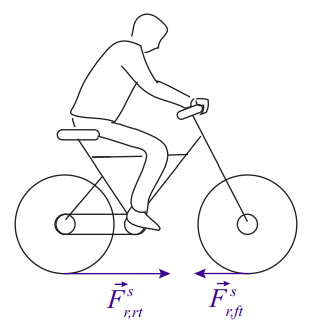
Consider an accelerating bicycle. The rider exerts a torque on the pedals, which is transmitted to the rear wheel by the chain (possibly amplified by the gears, etc). How does this “drive” torque on the rear wheel (call it \(\tau_d\)) relate to the final acceleration of the center of mass of the bicycle?
Solution
We need first to figure out how many external forces, at a minimum, we have to deal with. As the bicycle accelerates, two things happen: the wheels (both wheels) turn faster, so there must be a net torque (clockwise in the picture, if the bicycle is accelerating to the right) on each wheel; and the center of mass of the system accelerates, so there must be a net external force on the whole system. The system is only in contact with the road, and so, as long as no slippage happens, the only external source of torques or forces on the wheels has to be the force of static friction between the tires and the road.
For the front wheel, this is in fact the only external force, and the only force of any sort that exerts a torque on that wheel (there are forces acting at the axle, but they exert no torque around the axle). Since the torque has to be clockwise, then, the force of static friction on the front wheel, applied as it is at the point of contact with the road, must point backwards, that is, opposite the direction of motion. We get then one equation of motion (of the type (9.4.7)) for that wheel:
\[ -F_{r, f t}^{s} R=I \alpha \label{eq:9.44} \]
where the subscript “ft” stands for “front tire”, and the wheel is supposed to have a radius \(R\) and moment of inertia \(I\).
For the rear wheel, we have the “drive torque” \(\tau_d\), exerted by the chain, and another torque exerted by the force of static friction, \(\vec F^s_{r,rt}\), between that tire and the road. However, now the force \(\vec F^s_{r,rt}\) needs to point forward. This is because the net external force on the whole bicycle-rider system is \(\vec{F}_{r, r t}^{s}+\vec{F}_{r, f t}^{s}\), and that has to point forward, or the center of mass could never accelerate in that direction. Since we have established that \(F^s_{r,f t}\) has to point backwards, it follows that \(F^s_{r,rt}\) needs to be larger, and in the forward direction. This means we get, for the center of mass acceleration, the equation (\(F_{net} = M a_{cm}\))
\[ F_{r, r t}^{s}-F_{r, f t}^{s}=M a_{c m} \label{eq:9.45} \]
and for the rear wheel, the torque equation
\[ F_{r, r t}^{s} R-\tau_{d}=I \alpha \label{eq:9.46} .\]
I am following the convention that clockwise torques are negative, and also that a force symbol without an arrow on top represents the magnitude of the force. If a clockwise angular acceleration is likewise negative, the condition of rolling without slipping [Equation (9.6.4)] needs to be written as
\[ a_{cm} = -R \alpha \label{eq:9.47} .\]
These are all the equations we need to relate the acceleration to \(\tau_d\). We can start by solving (\ref{eq:9.44}) for \(F^s_{r,f t}\) and substituting in (\ref{eq:9.45}), then likewise solving (\ref{eq:9.46}) for \(F^s_{r,rt}\) and substituting in (\ref{eq:9.45}). The result is
\[ \frac{I \alpha+\tau_{d}}{R}+\frac{I \alpha}{R}=M a_{c m} \label{eq:9.48} \]
then use Eq (\ref{eq:9.47}) to write \(\alpha = −a_{cm}/R\), and solve for \(a_{cm}\):
\[ a_{c m}=\frac{\tau_{d}}{M R+2 I / R} \label{eq:9.49} \]
Example \(\PageIndex{2}\): Blocks connected by rope over a pulley with non-zero mass
Consider again the setup illustrated in Figure 6.3.1, but now assume that the pulley has a mass \(M\) and radius \(R\). For simplicity, leave the friction force out. What is now the acceleration of the system?
Solution
The figure below shows the setup, plus free-body diagrams for the two blocks (the vertical forces on block 1 have been left out to avoid cluttering the figure, since they are not relevant here), and an extended free-body diagram for the pulley. (You can see from the pulley diagram that there has to be another force acting on it, to balance the two forces shown. This would be a contact force at the axle, directed upwards and to the left. If this was a statics problem, I would have to include it, but since it does not exert a torque around the axis of rotation, it does not contribute to the dynamics of the system, so I have left it out as well.)
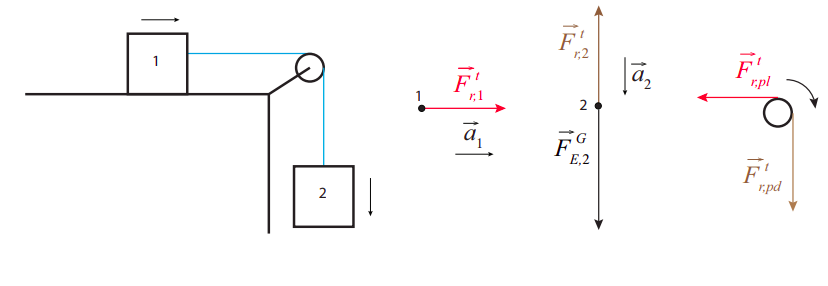
The key new feature of this problem is that the tension on the string has to have different values on either side of the pulley, because there has to be a net torque on the pulley. Hence, the leftward force on the pulley (\(F^t_{r,pl}\)) has to be smaller than the downward force (\(F^t_{r,pd}\)).
On the other hand, as long as the mass of the rope is negligible, it will still be the case that the horizontal part of the rope will pull with equal strength on block 1 and on the pulley, and similarly the vertical part of the rope will pull with equal strength on the pulley and on block 2. (To make this point clearer, I have “color-coded” these matching forces in the figure.) This means that we can write \(F^t_{r,pl} = F^t_{r,1}\) and \(F^t_{r,pd} = F^t_{r,2}\), and write the torque equation (9.4.7) for the pulley as
\[ F_{r, 1}^{t} R-F_{r, 2}^{t} R=I \alpha \label{eq:9.50} .\]
We also have \(F = ma\) for each block:
\[ F_{r, 1}^{t}=m_{1} a \label{eq:9.51} \]
\[ F_{r, 2}^{t}-m_{2} g=-m_{2} a \label{eq:9.52} \]
where I have taken \(a\) to be \(a = |\vec{a}_1| = |\vec{a}_2|\). The condition of rolling without slipping, Equation (9.6.4), applied to the pulley, gives then
\[ -R \alpha = a \label{eq:9.53} \]
since, in the situation shown, \(\alpha\) will be negative, and \(a\) has been defined as positive. Substituting Eqs. (\ref{eq:9.51}), (\ref{eq:9.52}), and (\ref{eq:9.53}) into (\ref{eq:9.50}), we get
\[ m_{1} a R-\left(m_{2} g-m_{2} a\right) R=-\frac{I a}{R} \label{eq:9.54} \]
which is easily solved for \(a\):
\[ a=\frac{m_{2} g}{m_{1}+m_{2}+I / R^{2}} \label{eq:9.55} .\]
If you look at the structure of this equation, it all makes sense. The numerator is the force of gravity on block 2, which is, ultimately, the force responsible for setting the whole thing in motion. The denominator is, essentially, the inertia of the system: ordinary inertia for the blocks, and rotational inertia for the pulley. Note further that, if we treat the pulley as a flat, homogeneous disk of mass \(M\), then \(I = \frac{1}{2}MR^2\), and the denominator of (\ref{eq:9.55}) becomes just \(m_1 + m_2 + M/2\).