
8.2: Other Restoring Forces
- Page ID
- 18423
Pendulums
A mass on a spring is not the only physical system that exhibits simple harmonic motion. Another example is – at least to a good approximation for small amplitudes – pendulums. To say that a pendulum has a restoring force is imprecise – a pendulum is characterized by angular motion, and therefore it is affected by a restoring torque. The first type of pendulum we will consider is the simple pendulum. This is exactly as it sounds – it consists of a point mass under the influence of gravity at the end of a massless string which is attached to a fixed point.
It's clear that if one defines the motion of the simple pendulum in terms of angular position, the motion is oscillatory – gravity keeps producing a torque that seeks to restore vertical alignment. But is it simple harmonic motion? We need to do the analysis to figure it out. Figure 8.2.1 gives a diagram with lots of labeling, along with a free-body diagram.
Figure 8.2.1 – The Simple Pendulum
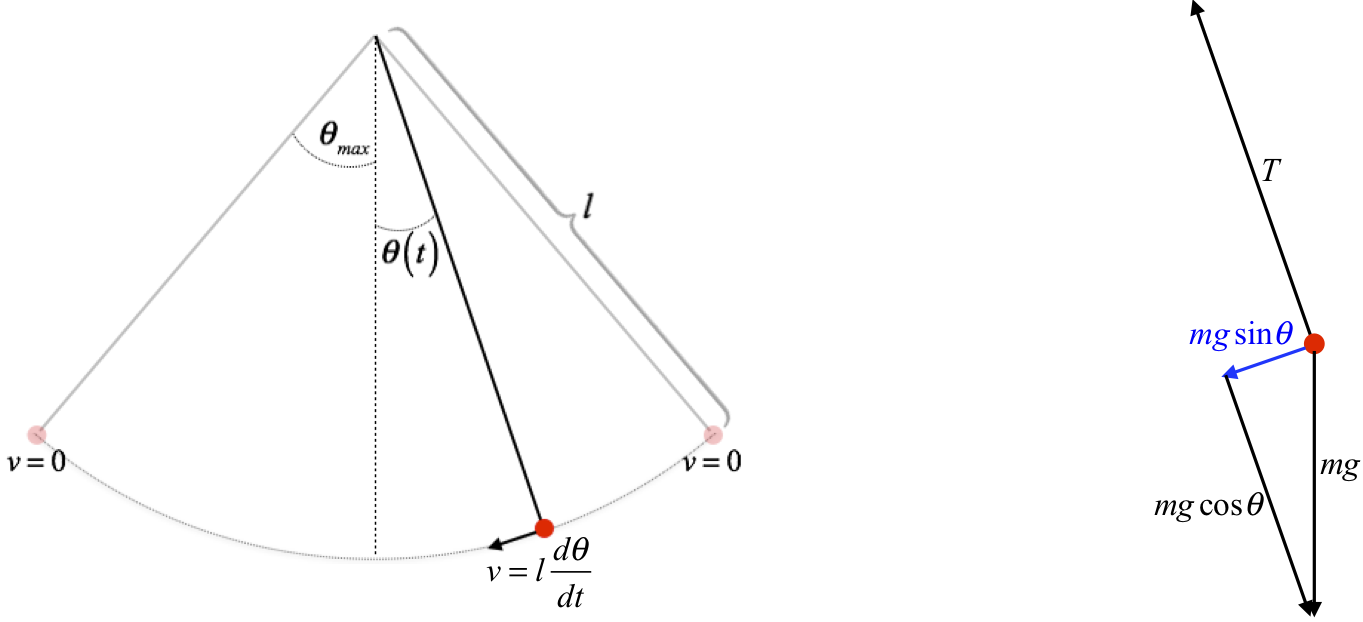
We wish to describe the motion of the pendulum, which means finding the function \(\theta\left(t\right)\). We do this using Newton's second law, as we did with the mass-on-spring. We can use either the linear or the rotational form of Newton's second law – naturally both lead to the same result. Let's use the rotational version, as we will need to do later when the pendulum is not "simple." Choosing counterclockwise as the positive direction (so the pendulum to the right of the vertical is in the positive region), we see that the torque for the diagram above is negative – the restoring force has the opposite sign of the displacement, as it must.
\[ \left. \begin{array}{l} \tau = -rF_\bot = -l\left(mg\sin\theta\right) \\ \tau = I\alpha = \left(ml^2\right)\alpha = \left(ml^2\right) \dfrac{d^2\theta}{dt^2} \end{array} \right\} \;\;\; \Rightarrow \;\;\; \dfrac{d^2\theta}{dt^2}+\dfrac{g}{l}\sin\theta=0 \]
This is not the same as the differential equation for the mass-on-spring, given in Equation 8.1.1. However, if we assume the pendulum exhibits a small amplitude, then the value of \(\sin\theta\) is very close to the value of \(\theta\), when measured in radians. For example, for a \(30^o\) angle, the sine is 0.5000, and in radians this angle is \(\frac{\pi}{6}\) = 0.5236, for a deviation of less than 5%.
Alert
If you are not comfortable with this \(\sin\theta \approx \theta\) approximation, start getting used to it – it is used all the time in physics!
Applying this approximation, we get the differential equation:
\[ \dfrac{d^2\theta}{dt^2}+\dfrac{g}{l}\theta=0 \]
This does match the differential equation we found for the mass-on-spring, so the solution is the same (simple harmonic motion):
\[ \theta\left(t\right) = \theta_{max} \sin\left(\omega t + \phi\right),\;\;\;\;\;\; where\;\; \omega=\sqrt{\dfrac{g}{l}} \]
Alert
Note that the \(\omega\) used in the argument of the sine function above is the angular frequency of the motion, and is a constant value. It is not the angular velocity of the pendulum \(\dfrac{d\theta}{dt}\), which is constantly changing.
All of the same things that we followed with for the mass-on-spring follows here, such as the velocity and acceleration functions and their maximum values, as well as the energy stored in the system. This last item bears some examination before we move on. The energy in the system is the gravitational potential energy stored at the maximum angle (measured relative to the bottom of the swing). Doing some geometry, we can get the height of the mass above the bottom of the swing, and from it the total energy:
\[ y = l\left(1-\cos\theta_{max}\right) \;\;\; \Rightarrow \;\;\; E_{tot} = U_{max} = mgy=mgl\left(1-\cos\theta_{max}\right) \]
Okay, now we get to use the approximation of the cosine function for small angles:
\[ \cos\theta \approx 1-\dfrac{1}{2}\theta^2 \]
Plugging this in above gives:
\[ E_{tot} = \frac{1}{2}mgl\theta_{max}^2 \]
The reader will note that this bears a resemblance to Equation 8.1.12, which also indicates that the total energy in the system is proportional to the square of the amplitude.
The leap to other pendulums (those that are not "simple") is not a difficult one to take, if the restoring torque is also based on gravity (i.e. the pendulum swings). All this requires is replacing the point mass's rotational inertia of \(ml^2\) with whatever the pendulum's rotational inertia around the fixed point happens to be, and computing the restoring torque based on wherever the center of mass happens to be. Calling the rotational inertia \(I\) and the distance of the center of mass from the fixed point \(d\), and following the same procedure as above, we get for the differential equation:
\[ \dfrac{d^2\theta}{dt^2}+\dfrac{mgd}{I}\theta=0 \]
The angular frequency is still the square root of the coefficient of \(\theta\), so the period of oscillation for this more general pendulum is:
\[ T = \dfrac{2\pi}{\omega} = 2\pi \sqrt{\dfrac{I}{mgd}}\]
Example \(\PageIndex{1}\)
A thin, uniform rod with a length of \(40cm\) is suspended vertically from one end, from which it is free to rotate without friction. If it is rotated a small angle from the vertical and released from rest, find how long it takes to reach a vertical orientation.
- Solution
-
The rod is displaced a small angle, so we can treat it as a pendulum. When it starts from rest, it starts at its maximum angular displacement, and are asked to find the time it takes to get to its equilibrium point. This constitutes exactly one fourth of a cycle (it takes the same time to swing up to its maximum angular displacement from the equilibrium point), so all we need to compute is one fourth of a period. The rotational inertia is that of a rod about its end, and the center of mass is at the middle of the rod, so:
\[ \dfrac{T}{4} = \dfrac{2\pi}{4} \sqrt{\dfrac{\frac{1}{3}ml^2}{mg\left(\frac{1}{2}l\right)}} = \pi\sqrt{\dfrac{l}{6g}} = \boxed{0.26s} \nonumber \]
Potential Wells
At the end of Section 3.7, we looked at how we can model chemical bonds as springs. A program was outlined there which provided a way to derive an effective spring constant for any potential with a local minimum. It turns out that the "natural" vibration frequencies of these bonds are quite important when it comes to things like wavelengths of light that the material will absorb or emit, so being able to derive an effective spring constant from the potential function gives us a lot of information about how the material will behave.
There is one complication that arises with these bonds-as-springs models, however. The two molecules attached by the spring are both moving. How do we even fit this into our model where a single mass is oscillating through an equilibrium point? It turns out that there is a nice trick we can use for all two-body problems like this by considering the center of mass frame. [Note: This trick is also used for gravitation when the orbiting body and gravitating body have comparable masses.]
Consider a spring with masses at both ends. There is no net external force on the system, so as they vibrate, the center of mass remains at rest (we are assuming it started off at rest). We can therefore break this into two separate mass-on-spring systems, with the center of mass being a fixed point for each of them.
Figure 8.2.2 – Two Masses Connected By a Spring
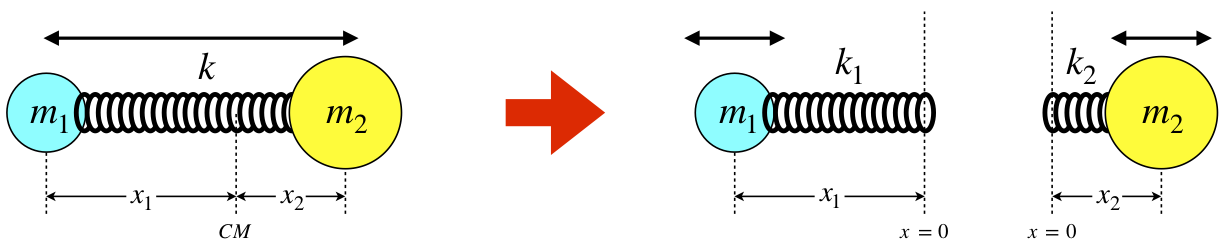
There are a number of things we can say about this model. First, there is a relationship between the variables \(x_1\) and \(x_2\) and the amount each of these changes. They are both measured from the center of mass in the left diagram, and are both positive values in the right diagram, giving:
\[ m_1x_1 = m_2x_2 \;\;\; \Rightarrow \;\;\; m_1\Delta x_1 = m_2\Delta x_2 \;\;\; \Rightarrow \;\;\; \Delta x_2 = \dfrac{m_1}{m_2}\Delta x_1\]
The amount of force exerted on each mass by the spring is the same at every moment (Newton's third law), and the magnitude of this force is determined by the stretch (or compression) of the full spring according to Hooke's law. The stretch/compression of the full spring is equal to the sum of the stretches/compressions of the two springs in the separated diagram, so:
\[ F = k\Delta x = k\left(\Delta x_1 + \Delta x_2 \right) = k\Delta x_1\left(1+\dfrac{m_1}{m_2}\right) \]
But looking at this force from the perspective of just \(m_1\) in the right diagram, the force exerted on it is due to its own spring and its diplacement. Making this comparison gives us \(k_1\) in terms of \(k\):
\[ F = k\Delta x_1\left(1+\dfrac{m_1}{m_2}\right) = k_1\Delta x_1 \;\;\; \Rightarrow \;\;\; k_1 = \left(\dfrac{m_1+m_2}{m_2}\right)k \]
The angular frequency of oscillation for \(m_1\) is determined by its mass and the spring constant of the elastic force acting on it:
\[ \omega = \sqrt{\dfrac{k_1}{m_1}} = \sqrt{\dfrac{k}{\mu}}, \;\;\;\;\;\; where:\;\; \mu \equiv \dfrac{m_1m_2}{m_1+m_2} \]
The motion of \(m_2\) mirrors that of \(m_1\), except with a different (smaller) amplitude. We know this because the two masses have to reach their maximum and minimum displacements at the same time to keep the center of mass stationary. So the angular frequency of oscillation for \(m_2\) should come out to be the same as it is for \(m_1\), and sure enough, it does (repeat all of the steps above with the subscripts 1 and 2 reversed).
The quantity \(\mu\) has units of mass, and is commonly referred to as the reduced mass of the system. Its use is a common shortcut for reducing two-body problems to one-body problems. The angular frequency here takes on the usual form for a one-dimensional simple harmonic oscillator, and all that needs to be done is to calculate the reduced mass from the two masses involved and use the full spring constant (possibly computed from a potential function with a local minimum).