
9.4: Kepler's First and Third Laws from Newton's Law of Gravitation
- Page ID
- 6844

In figure \(\text{IX.2}\) I illustrate two masses (they needn’t be point masses – as long as they are spherically symmetric, they act gravitationally as if they were point masses) revolving about their common centre of mass \(\text{C}\).

\(\text{FIGURE IX.2}\)
At some time they are a distance \(r\) apart, where
\[r = r_1 + r_2, \quad r_1 = \frac{mr}{M + m}, \quad r_2 = \frac{Mr}{M + m} \label{9.5.1} \tag{9.5.1}\]
The Equations of motion of \(m\) in polar coordinates (with \(\text{C}\) as pole) are
- Radial: \[\ddot{r_2} - r_2 \dot{θ}^2 = -GM/r^2 . \label{9.5.2} \tag{9.5.2}\]
- Transverse: \[r_2 \ddot{θ} + 2 \dot{r_2} \dot{θ} = 0. \label{9.5.3} \tag{9.5.3}\]
Elimination of \(t\) between these Equations will in principle give us the Equation, in polar coordinates, of the path.
A slightly easier approach is to write down expressions for the angular momentum and the energy. The angular momentum per unit mass of \(m\) with respect to \(\text{C}\) is
\[h_2 = r_2^2 \dot{θ}. \label{9.5.4} \tag{9.5.4}\]
The speed of \(m\) is \(\sqrt{\dot{r}_2^2 + r_2^2 \dot{θ}^2}\) and the speed of \(M\) is \(m/M\) times this. Some effort will be required of the reader to determine that the total energy \(E\) of the system is
\[E = \frac{1}{2} m_+ \left( \dot{r}_2^2 + r_2^2 \dot{θ}^2 \right) - \frac{GM^2 \mu}{r^2}. \label{9.5.5} \tag{9.5.5}\]
[It is possible that you may have found this line quite difficult. The reason for the difficulty is that we are not making the approximation of a planet of negligible mass moving around a stationary Sun, but we are allowing both bodies to have comparable masses and the move around their common centre of mass. You might first like to try the simpler problem of a planet of negligible mass moving around a stationary Sun. In that case \(r_1 = 0\) and \(r = r_2\) and \(\text{m} → m\), \(\mathfrak{M} → M\) and \(m_+ → m\).]
It is easy to eliminate the time between Equations \ref{9.5.4} and \ref{9.5.5}. Thus you can write
\[\dot{r}_2 = \frac{dr_2}{dt} = \frac{dr_2}{dθ} \cdot \frac{dθ}{dt} = \dot{θ} \frac{dr_2}{dθ}\]
and then use Equation \ref{9.5.4} to eliminate \(\dot{θ}\). You should eventually obtain
\[\frac{m_+ h_2^2}{r_2^4} \left[ \left( \frac{dr_2}{dθ} \right)^2 + r_2^2 \right] = 2E + \frac{2GM^2 \mu}{r^2} . \label{9.5.6} \tag{9.5.6}\]
This is the differential Equation, in polar coordinates, for the path of \(m\). All that is now required is to integrate it to obtain \(r_2\) as a function of \(θ\).
At first, integration looks hopelessly difficult, but it proceeds by making one tentative substitution after another to see if we can’t make it look a little easier. For example, we have (if we multiply out the square bracket) \(r_2\) in the denominator three times in the Equation. Let’s at least try the substitution \(w = 1/r_2\). That will surely make it look a little easier. You will have to use
\[\frac{dr_2}{dθ} = \frac{dr_2}{dw} \frac{dw}{dθ} = -\frac{1}{w^2} \frac{dw}{dθ},\]
and after a little algebra you should obtain
\[ \left( \frac{dw}{dθ} \right)^2 + \left( w - \frac{GM^2 \mu}{m_+ h_2^2} \right)^2 = \frac{2E}{m_+ h_2^2} + \frac{G^2 M^4 \mu^2}{m_+^2 h_2^4}. \label{9.5.7} \tag{9.5.7}\]
This may at first sight not look like much of an improvement, but the right hand side is just a lot of constants, and, since it is positive, let’s call the right hand side \(H^2\). (In case you doubt that the right hand side is positive, the left hand side certainly is!) Also, make the obvious substitution
\[u = w - \frac{GM^2 \mu}{m_+ h_2^2}, \label{9.5.8}\]
and the Equation becomes almost trivial:
\[\left( \frac{du}{dθ} \right)^2 + u^2 = H^2 , \label{9.5.9} \tag{9.5.9}\]
from which we proceed to
\[\int dθ = \pm \int \frac{du}{\sqrt{H^2 - u^2}}. \label{9.5.10} \tag{9.5.10}\]
At this stage you can choose either the \(+\) or the \(−\) and you can choose to make the next substitution \(u = H \sin \phi\) or \(u = H \cos \phi\); you'll get the same result in the end. I'll choose the plus sign and I’ll let \(u = H \cos \phi\), and I get \(\int dθ = − \int d\phi\) and hence
\[θ = −\phi + ω, \label{9.5.11} \tag{9.5.11}\]
where \(ω\) is the arbitrary constant of integration. Now you have to go back and remember what \(\phi\) was, what \(u\) was and what \(w\) was and what \(H\) was. Thus \(θ − ω = −\phi, \ \therefore \cos (θ − ω) = \cos (−\phi) = cos \phi = u/H = ...\) and so on. Your aim is to get it in the form \(r_2 =\) function of θ, and, if you persist, you should eventually get
\[r_2 = \frac{m_+ h_2^2 / (GM^2 \mu)}{1 + \left( 1 + \frac{2Eh_2^2 m_+}{G^2 M^4 \mu^2} \right)^{1/2} \cos (θ−ω)} . \label{9.5.12} \tag{9.5.12}\]
You’ll immediately recognize this from Equation 2.3.37 or 2.4.16 or 2.5.18:
\[r = \frac{l}{1 + e \cos (θ −ω)} \label{2.3.37} \tag{2.3.37}\]
as being the polar Equation to a conic section (ellipse, parabola or hyperbola). Equation \ref{9.5.12} is the Equation of the path of the mass \(m\) about the centre of mass of the two bodies. The eccentricity is
\[e = \left( 1 + \frac{2Eh_2^2 m_+}{G^2 M^4 \mu^2} \right)^{1/2} , \label{9.5.13} \tag{9.5.13}\]
or, if you now recall what are meant by \(\mu\) and \(m_+\),
\[e = \left( 1 + \frac{2Eh_2^2}{G^2} \cdot \frac{(M+m)^3}{M^5m} \right)^{1/2} . \label{9.5.14} \tag{9.5.14}\]
(Check the dimensions of this!)
The eccentricity is less than 1, equal to 1, or greater than 1 (i.e. the path is an ellipse, a parabola or a hyperbola) according to whether the total energy E is negative, zero or positive.
The semi latus rectum of the path of \(m\) relative to the centre of mass is of length
\[l_2 = \frac{m_+ h_2^2}{GM^2 \mu}, \label{9.5.15} \tag{9.5.15}\]
or
\[l_2 = \frac{h_2^2}{G} \cdot \frac{(M+m)^2}{M^3}. \label{9.5.16} \tag{9.5.16}\]
(Check the dimensions of this!)
We can also write Equations \ref{9.5.15} or \ref{9.5.16} as
\[h_2^2 = G \mathfrak{M} l_2 . \label{9.5.17} \tag{9.5.17}\]
At this point it is useful to recall what we mean by \(\mathfrak{M}\) and by \(h_2\). \(\mathfrak{M}\) is the mass function, given by Equation 9.4.3:
\[\mathfrak{M} = \frac{M^3}{(M+m)^2}. \label{9.4.3} \tag{9.4.3}\]
Let us suppose that the total energy is negative, so that the orbits are elliptical. The two masses are revolving in similar elliptic orbits around the centre of masses; the semi latus rectum of the orbit of \(m\) is \(l_2\), and the semi latus rectum of the orbit of \(M\) is \(l_1\), where
\[\frac{l_2}{l_1} = \frac{M}{m}. \label{9.5.18} \tag{9.5.18}\]
Relative to \(M\) the mass \(m\) is revolving in a larger but still similar ellipse with semi latus rectum \(l\) given by
\[l = \frac{M+m}{M}l_2 . \label{9.5.19} \tag{9.5.19}\]
I am now going to define \(h\) as the angular momentum per unit mass of \(m\) relative to \(M\). In other words, we are working in a frame in which \(M\) is stationary and \(m\) is moving around \(M\) in an elliptic orbit of semi latus rectum \(l\). Now angular momentum per unit mass is proportional to the areal speed, and therefore it is proportional to the square of the semi latus rectum. Thus we have
\[\frac{h}{h_2} = \left( \frac{l}{l_2} \right)^2 = \left( \frac{M + m}{M} \right)^2 \label{9.5.20} \tag{9.5.20}\]
Combining Equations \ref{9.5.18}, \ref{9.4.3}, \ref{9.5.19}, \ref{9.5.20} and 9.4.1 we obtain
\[h^2 = G \textbf{M} l , \label{9.5.21} \tag{9.5.21}\]
where \(\textbf{M}\) is the total mass of the system.
Once again:
The angular momentum per unit mass of \(m\) relative to the centre of mass is , \(\sqrt{G\mathfrak{M} l_2}\) where \(l_2\) is the semi latus rectum of the orbit of \(m\) relative to the centre of mass, and it is \(\sqrt{G\textbf{M} l}\) relative to \(M\), where \(l\) is the semi latus rectum of the orbit of \(m\) relative to \(M\).
If you were to start this analysis with the assumption that \(m << M\), and that \(M\) remains stationary, and that the centre of mass coincides with \(M\), you would find that either Equation \ref{9.5.17} or \ref{9.5.21} reduces to
\[h^2 = G M l . \label{9.5.22} \tag{9.5.22}\]
The period of the elliptic orbit is area \(\div\) areal speed. The area of an ellipse is \(πab =πa^2 \sqrt{1 - e^2}\), and the areal speed is half the angular momentum per unit mass (see section 9.3) \(= \frac{1}{2} h = \frac{1}{2} \sqrt{G \textbf{M} l} = \frac{1}{2} \sqrt{G \textbf{M}a (1 - e^2)}\). Therefore the period is \(P = \frac{2π}{\sqrt{G \textbf{M}}} a^{3/2},\) or
\[P^2 = \frac{4π^2}{G \textbf{M}}a^3 , \label{9.5.23} \tag{9.5.23}\]
which is Kepler’s third law.
We might also, while we are at it, express the eccentricity (Equation) in terms of \(h\) rather than \(h_2\), using Equation \ref{9.5.20}. We obtain:
\[e = \left( 1 + \frac{2Eh^2}{G^2 Mm (M+m)} \right)^{1/2} . \label{9.5.24} \tag{9.5.24}\]
If we now substitute for \(h^2\) from Equation \ref{9.5.21}, and invert Equation \ref{9.5.24}, we obtain, for the energy of the system
\[E = \frac{Gm (M + m) (e^2 - 1)}{2l}, \label{9.5.25} \tag{9.5.25}\]
or for the energy or the system per unit mass of \(m\):
\[\text{E} = \frac{G \textbf{M} \left( e^2 - 1 \right)}{2l}. \label{9.5.26} \tag{9.5.26}\]
Here \(\textbf{M}\) is the mass of the system – i.e. \(M+m\). \(E\) in Equation \ref{9.5.25} is the total energy of the system, which includes the kinetic energy of both masses as well as the mutual potential energy of the two, while \(\text{E}\) in Equation \ref{9.5.26} is merely \(E/m\). That is, it is, as stated, the energy of the system per unit mass of \(m\).
Equations \ref{9.5.21} and \ref{9.5.26} apply to any conic section. For the different types of conic section they can be written:
For an ellipse:
\[h = \sqrt{G \textbf{M} a (1 - e^2) ,} \quad \text{E} = -\frac{G \textbf{M}}{2a} \label{9.5.27a,b} \tag{9.5.27a,b}\]
For a parabola:
\[h = \sqrt{2G \textbf{M} q ,} \quad \text{E} = 0 \label{9.5.28a,b} \tag{9.5.28a,b}\]
For a hyperbola:
\[h = \sqrt{G \textbf{M} a (e^2 - 1) ,} \quad \text{E} = + \frac{G \textbf{M}}{2a} \label{9.5.29a,b} \tag{9.5.29a,b}\]
We see that the energy of an elliptic orbit is determined by the semi major axis, whereas the angular momentum is determined by the semi major axis and by the eccentricity. For a given semi major axis, the angular momentum is greatest when the orbit is circular.
Still referring the orbit of \(m\) with respect to \(M\), we can find the speed \(V\) of \(m\) by noting that
\[\text{E} = \frac{1}{2} V^2 - \frac{G\textbf{M}}{r} \label{9.5.30} \tag{9.5.30}\]
and, by making use of the b-parts of Equations 9.5.27-29, we find the following relations between speed of \(m\) in an orbit versus distance from \(M\):
Ellipse: \[V^2 = G \textbf{M} \left( \frac{2}{r} - \frac{1}{a} \right) . \label{9.5.31} \tag{9.5.31}\]
Parabola: \[V^2 = \frac{2G\textbf{M}}{r}. \label{9.5.32} \tag{9.5.32}\]
Hyperbola: \[V^2 = G \textbf{M} \left( \frac{2}{r} + \frac{1}{a} \right) . \label{9.5.33} \tag{9.5.33}\]
Circle: \[V^2 = \frac{G \textbf{M}}{a}. \label{9.5.34} \tag{9.5.34}\]
Exercise: Show that in an elliptic orbit, the speeds at perihelion and aphelion are, respectively, \(\sqrt{\frac{GM}{a} \left( \frac{1+e}{1-e} \right)}\) and \(\sqrt{\frac{GM}{a} \left( \frac{1-e}{1+e} \right)}\) and that the ratio of perihelion to aphelion speed is, therefore, \(\frac{1+e}{1-e}\).
It might be noted at this point, from the definition of the astronomical unit (Chapter 8, section 8.1), that if distances are expressed in astronomical units, periods and time intervals in sidereal years, \(GM\) (where \(M\) is the mass of the Sun) has the value \(4π^2\). The mass of a comet or asteroid is much smaller than the mass of the Sun, so that \(\textbf{M} = M + m \simeq M\). Thus, using these units, and to this approximation, Equation \ref{9.5.23} becomes merely \(P^2 = a^3\).
I am much indebted to Dr Bob Rimmer, for the following delightful construction. Dr Rimmer found it in the recent book Feynman’s Lost Lecture, The Motion of the Planets Around the Sun, by D.L. and J.R. Goodstein, and Feynman in his turn ascribed it to a passage (Section IV, Lemma XV) in the Principia of Sir Isaac Newton. It has no doubt changed slightly with each telling, and I present it here as follows.
\(\text{C}\) is a circle of radius \(2a\) (Figure \(\text{IX.3}\)). \(\text{F}\) is the centre of the circle, and \(\text{F}^\prime\) is a point inside the circle such that the distance \(\text{FF}^\prime = 2ae\), where \(e < 1\). Join \(\text{F}\) and \(\text{F}^\prime\) to a point \(\text{Q}\) on the circle. \(\text{MP}^\prime\) is the perpendicular bisector of \(\text{F}^\prime \text{Q}\), meeting \(\text{FQ}\) at \(\text{P}\).
The reader is invited to show that, as the point \(\text{Q}\) moves round the circle, the point \(\text{P}\) describes an ellipse of eccentricity \(e\), with \(\text{F}\) and \(\text{F}^\prime\) as foci, and that \(\text{MP}^\prime\) is tangent to the ellipse.
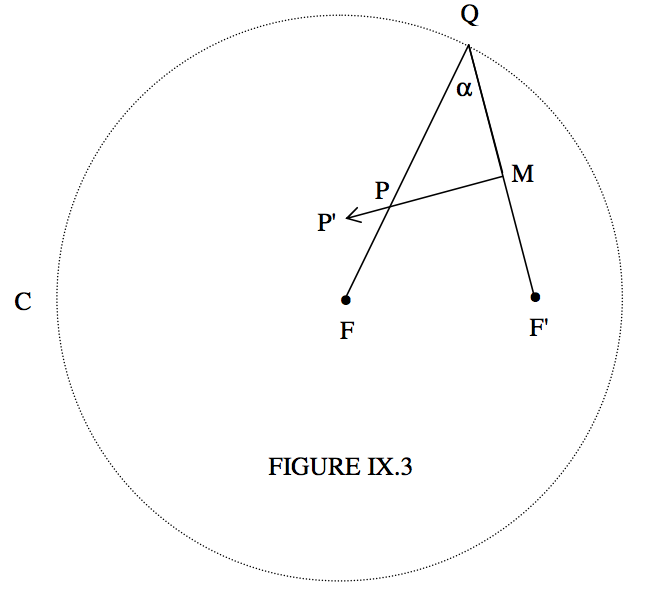
Hint: It is very easy – no math required! Draw the line \(\text{F}^\prime \text{P}\), and let the lengths of \(\text{FP}\) and \(\text{F}^\prime \text{P}\) be \(r\) and \(r^\prime\) respectively. It will then become very obvious that \(r + r^\prime\) is always equal to \(2a\), and hence \(\text{P}\) describes an ellipse. By looking at an isosceles triangle, it will also be clear that the angles \(\text{F}^\prime \text{PM}\) and \(\text{FPP}^\prime\) are equal, thus satisfying the focus-to-focus reflection property of an ellipse, so that \(\text{MP}^\prime\) is tangent to the ellipse.
But there is better to come. You are asked to find the length \(\text{QF}^\prime\) in terms of \(a\), \(e\) and \(r^\prime\), or \(a\), \(e\) and \(r\).
An easy way to do it is as follows. Let \(\text{QF}^\prime = 2p\), so that \(\text{QM} = p\). From the right-angled triangle \(\text{QMP}\) we see that \(\cos α = p / r^\prime\). Apply the cosine rule to triangle \(\text{QFF}^\prime \) to find another expression for \(\cos α\), and eliminate \(\cos α\) from your two Equations. You should quickly arrive at
\[p^2 = a^2 (1-e^2) \times \frac{r^\prime}{2a - r^\prime}. \label{9.5.35} \tag{9.5.35}\]
And, since \(r^\prime = 2a − r\), this becomes
\[p = a \sqrt{(1-e)^2} \times \sqrt{\frac{2a-r}{r}} = a^{3/2} \sqrt{(1-e)^2} \times \sqrt{\frac{2}{r} - \frac{1}{a}}. \label{9.5.36} \tag{9.5.36}\]
Now the speed at a point \(\text{P}\) on an elliptic orbit, in which a planet of negligible mass is in orbit around a star of mass \(M\) is given by
\[V = \sqrt{GM \left( \frac{2}{r} - \frac{1}{a} \right)}. \label{9.5.37} \tag{9.5.37}\]
Thus we arrive at the result that the length of \(\text{F}^\prime \text{Q}\) (or of \(\text{F}^\prime \text{M}\)) is proportional to the speed of a planet \(\text{P}\) moving around the Sun \(\text{F}\) in an elliptic orbit, and of course the direction \(\text{MP}^\prime\), being tangent to the ellipse, is the direction of motion of the planet. Figure \(\text{IX.4}\) shows the ellipse.
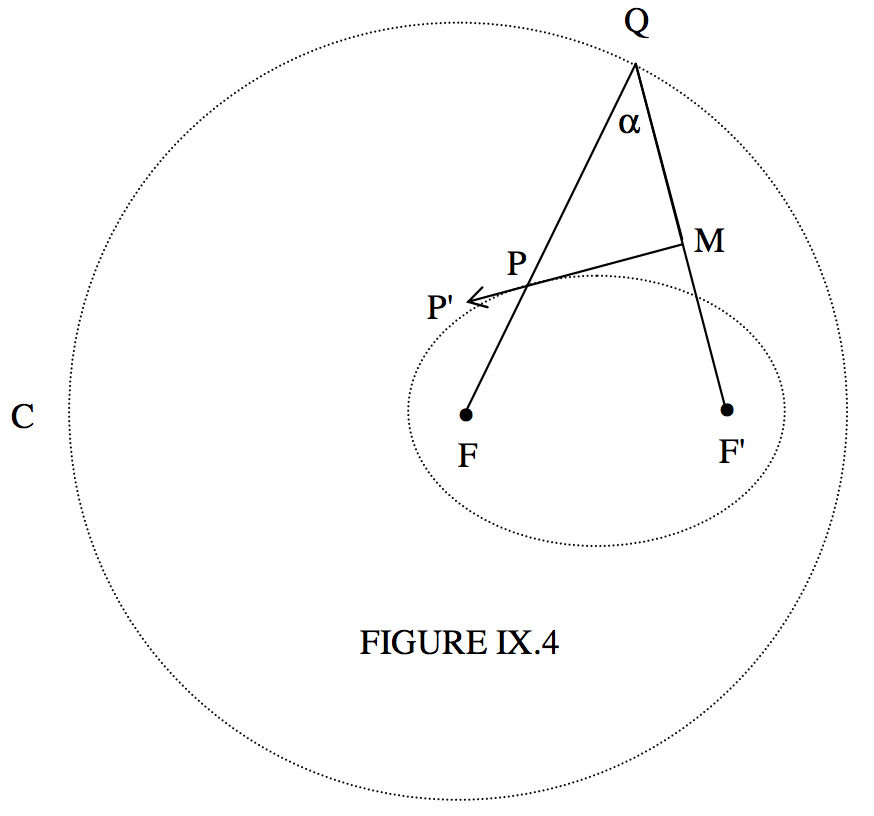
It is left to the reader to investigate what happens it \(\text{F}^\prime\) is outside, or on, the circle