
5.2: Rigid-Body Rotation
- Page ID
- 949

4.2.1 Kinematics
When a rigid object rotates, every part of it (every atom) moves in a circle, covering the same angle in the same amount of time, a. Every atom has a different velocity vector, b. Since all the velocities are different, we can't measure the speed of rotation of the top by giving a single velocity. We can, however, specify its speed of rotation consistently in terms of angle per unit time. Let the position of some reference point on the top be denoted by its angle \(\theta\), measured in a circle around the axis. For reasons that will become more apparent shortly, we measure all our angles in radians. Then the change in the angular position of any point on the top can be written as \(d\theta\), and all parts of the top have the same value of \(d\theta\) over a certain time interval \(dt\). We define the angular velocity, \(\omega\) (Greek omega),
which is similar to, but not the same as, the quantity \(\omega\) we defined earlier to describe vibrations. The relationship between \(\omega\) and \(t\) is exactly analogous to that between \(x\) and \(t\) for the motion of a particle through space.
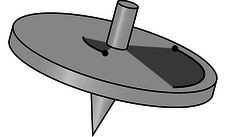
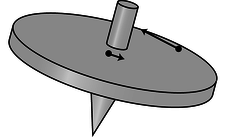
Figure 4.2.1: (left) he two atoms cover the same angle in a given time interval. (right) Their velocity vectors, however, differ in both magnitude and direction.
Exercise \(\PageIndex{1}\)
If two different people chose two different reference points on the top in order to define \(\theta\text{=0}\), how would their \(\theta\)-\(t\) graphs differ? What effect would this have on the angular velocities?
(answer in the back of the PDF version of the book)
The angular velocity has units of radians per second, rad/s. However, radians are not really units at all. The radian measure of an angle is defined, as the length of the circular arc it makes, divided by the radius of the circle. Dividing one length by another gives a unitless quantity, so anything with units of radians is really unitless. We can therefore simplify the units of angular velocity, and call them inverse seconds, \(\text{s}^{-1}\).
Example \(\PageIndex{1}\): A 78-rpm record
\(\triangleright\) In the early 20th century, the standard format for music recordings was a plastic disk that held a single song and rotated at 78 rpm (revolutions per minute). What was the angular velocity of such a disk?
\(\triangleright\) If we measure angles in units of revolutions and time in units of minutes, then 78 rpm is the angular velocity. Using standard physics units of radians/second, however, we have
In the absence of any torque, a rigid body will rotate indefinitely with the same angular velocity. If the angular velocity is changing because of a torque, we define an angular acceleration,
The symbol is the Greek letter alpha. The units of this quantity are \(\text{rad}/\text{s}^2\), or simply \(\text{s}^{-2}\).
The mathematical relationship between \(\omega\) and \(\theta\) is the same as the one between \(v\) and \(x\), and similarly for \(\alpha\) and \(a\). We can thus make a system of analogies, c, and recycle all the familiar kinematic equations for constant-acceleration motion.
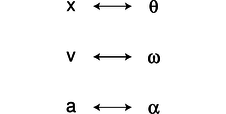
Figure 4.2.2: Analogies between rotational and linear quantities.
Example \(\PageIndex{2}\): The synodic period
Mars takes nearly twice as long as the Earth to complete an orbit. If the two planets are alongside one another on a certain day, then one year later, Earth will be back at the same place, but Mars will have moved on, and it will take more time for Earth to finish catching up. Angular velocities add and subtract, just as velocity vectors do. If the two planets' angular velocities are \(\omega_1\) and \(\omega_2\), then the angular velocity of one relative to the other is \(\omega_1-\omega_2\). The corresponding period, \(1/(1/T_1-1/T_2)\) is known as the synodic period.
Example \(\PageIndex{3}\): A neutron star
\(\triangleright\) A neutron star is initially observed to be rotating with an angular velocity of \( 2.0\ \text{s}^{-1}\), determined via the radio pulses it emits. If its angular acceleration is a constant \(- 1.0\times10^{-8}\ \text{s}^{-2}\), how many rotations will it complete before it stops? (In reality, the angular acceleration is not always constant; sudden changes often occur, and are referred to as “starquakes!”)
\(\triangleright\) The equation \(v_{f}^2- v_{i}^2\text{=2} a\Delta x\) can be translated into \(\omega_{f}^2-\omega_i^2\text{=2}\alpha\Delta\theta\), giving
4.2.2 Relations between angular quantities and motion of a point
It is often necessary to be able to relate the angular quantities to the motion of a particular point on the rotating object. As we develop these, we will encounter the first example where the advantages of radians over degrees become apparent.
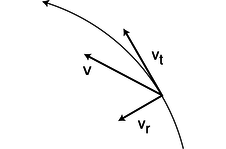
Figure 4.2.3: We construct a coordinate system that coincides with the location and motion of the moving point of interest at a certain moment.
The speed at which a point on the object moves depends on both the object's angular velocity \(\omega\) and the point's distance \(r\) from the axis. We adopt a coordinate system, d, with an inward (radial) axis and a tangential axis. The length of the infinitesimal circular arc \(ds\) traveled by the point in a time interval \(dt\) is related to \(d\theta\) by the definition of radian measure, \(d\theta=ds/r\), where positive and negative values of \(ds\) represent the two possible directions of motion along the tangential axis. We then have \(v_t = ds/dt = rd\theta/dt = \omega r\), or
\[ v_t = \omega r \]
The radial component is zero, since the point is not moving inward or outward,
\[v_r = 0 \]
Note that we had to use the definition of radian measure in this derivation. Suppose instead we had used units of degrees for our angles and degrees per second for angular velocities. The relationship between \(d\theta_{degrees}\) and \(ds\) is \(d\theta_{degrees} = (360/2\pi)s/r\), where the extra conversion factor of \((360/2\pi)\) comes from that fact that there are 360 degrees in a full circle, which is equivalent to \(2\pi\) radians. The equation for \(v_t\) would then have been \(v_t = (2\pi/360)(\omega_{degrees\ per\ second})(r)\), which would have been much messier. Simplicity, then, is the reason for using radians rather than degrees; by using radians we avoid infecting all our equations with annoying conversion factors.
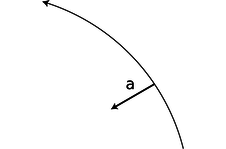
Figure 4.2.4: Even if the rotating object has zero angular acceleration, every point on it has an acceleration towards the center.
Since the velocity of a point on the object is directly proportional to the angular velocity, you might expect that its acceleration would be directly proportional to the angular acceleration. This is not true, however. Even if the angular acceleration is zero, i.e., if the object is rotating at constant angular velocity, every point on it will have an acceleration vector directed toward the axis, e. As derived on page 209, the magnitude of this acceleration is
\[ \text{radial acceleration of a point at a distance $r$ from the axis} \]
For the tangential component, any change in the angular velocity \(d\omega\) will lead to a change \(d\omega\cdot r\) in the tangential velocity, so it is easily shown that
\[ a_t = \alpha r .\]
Exercise \(\PageIndex{2}\)
Positive and negative signs of \(\omega\) represent rotation in opposite directions. Why does it therefore make sense physically that \(\omega\) is raised to the first power in the equation for \(v_t\) and to the second power in the one for \(a_r\)?
(answer in the back of the PDF version of the book)
Example \(\PageIndex{3}\): Radial acceleration at the surface of the Earth
\(\triangleright\) What is your radial acceleration due to the rotation of the earth if you are at the equator?
\(\triangleright\) At the equator, your distance from the Earth's rotation axis is the same as the radius of the spherical Earth, \( 6.4\times10^6\ \text{m}\). Your angular velocity is
which gives an acceleration of
The angular velocity was a very small number, but the radius was a very big number. Squaring a very small number, however, gives a very very small number, so the \(\omega^2\) factor “wins,” and the final result is small.
If you're standing on a bathroom scale, this small acceleration is provided by the imbalance between the downward force of gravity and the slightly weaker upward normal force of the scale on your foot. The scale reading is therefore a little lower than it should be.
4.2.3 Dynamics
If we want to connect all this kinematics to anything dynamical, we need to see how it relates to torque and angular momentum. Our strategy will be to tackle angular momentum first, since angular momentum relates to motion, and to use the additive property of angular momentum: the angular momentum of a system of particles equals the sum of the angular momenta of all the individual particles. The angular momentum of one particle within our rigidly rotating object, \(L=mv_\perp r\), can be rewritten as \(L=r\:p\:\sin\:\theta\), where \(r\) and \(p\) are the magnitudes of the particle's \(\mathbf{r}\) and momentum vectors, and \(\theta\) is the angle between these two vectors. (The r vector points outward perpendicularly from the axis to the particle's position in space.) In rigid-body rotation the angle \(\theta\) is 90°, so we have simply \(L=r p\). Relating this to angular velocity, we have
\[L=rp=(r)(mv)=(r)(m\omega r)=mr^2\omega.\]
The particle's contribution to the total angular momentum is proportional to \(\omega\), with a proportionality constant \(mr^2\). We refer to \(mr^2\) as the particle's contribution to the object's total moment of inertia, \(I\), where “moment” is used in the sense of “important,” as in “momentous” --- a bigger value of \(I\) tells us the particle is more important for determining the total angular momentum. The total moment of inertia is
The angular momentum of a rigidly rotating body is then
Since torque is defined as \(dL/dt\), and a rigid body has a constant moment of inertia, we have \(\tau=dL/dt =Id\omega/dt=I\alpha\),
which is analogous to \(F=ma\).
The complete system of analogies between linear motion and rigid-body rotation is given in figure f.
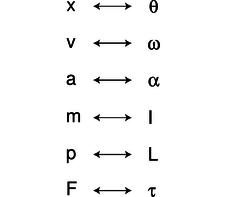
Figure 4.2.5: Analogies between rotational and linear quantities.
Example \(\PageIndex{3}\): A barbell
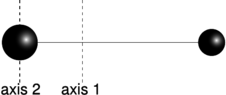
g / Example 15
\(\triangleright\) The barbell shown in figure g consists of two small, dense, massive balls at the ends of a very light rod. The balls have masses of 2.0 kg and 1.0 kg, and the length of the rod is 3.0 m. Find the moment of inertia of the rod (1) for rotation about its center of mass, and (2) for rotation about the center of the more massive ball.
\(\triangleright\) (1) The ball's center of mass lies 1/3 of the way from the greater mass to the lesser mass, i.e., 1.0 m from one and 2.0 m from the other. Since the balls are small, we approximate them as if they were two pointlike particles. The moment of inertia is
Perhaps counterintuitively, the less massive ball contributes far more to the moment of inertia.
(2) The big ball theoretically contributes a little bit to the moment of inertia, since essentially none of its atoms are exactly at \(r\)=0. However, since the balls are said to be small and dense, we assume all the big ball's atoms are so close to the axis that we can ignore their small contributions to the total moment of inertia:
This example shows that the moment of inertia depends on the choice of axis. For example, it is easier to wiggle a pen about its center than about one end.
| Example 16: The parallel axis theorem |
|---|
| \(\triangleright\) Generalizing the previous example, suppose we pick any axis parallel to axis 1, but offset from it by a distance \(h\). Part (2) of the previous example then corresponds to the special case of \(h=- 1.0\ \text{m}\) (negative being to the left). What is the moment of inertia about this new axis? \(\triangleright\) The big ball's distance from the new axis is \(\text{(1.0\ m)+} h\), and the small one's is \(\text{(2.0\ m)-} h\). The new moment of inertia is \[\begin{align*} I &= \text{(2.0 kg)}[\text{(1.0 m)+} h]^2 + \text{(1.0 kg)}[\text{(2.0 m)}- h]^2 \\ & = 6.0 \ \text{kg}\!\cdot\!\text{m}^2 + \text{(4.0}\ \text{kg}\!\cdot\!\text{m}) h - \text{(4.0}\ \text{kg}\!\cdot\!\text{m}) h + \text{(3.0 kg)} h^2 . \end{align*}\] The constant term is the same as the moment of inertia about the center-of-mass axis, the first-order terms cancel out, and the third term is just the total mass multiplied by \(h^2\). The interested reader will have no difficulty in generalizing this to any set of particles (problem 38, p. 294), resulting in the parallel axis theorem: If an object of total mass \(M\) rotates about a line at a distance \(h\) from its center of mass, then its moment of inertia equals \(I_{cm}+ Mh^2\), where \(I_{cm}\) is the moment of inertia for rotation about a parallel line through the center of mass. |
| Example 17: Scaling of the moment of inertia |
|---|
| \(\triangleright\) (1) Suppose two objects have the same mass and the same shape, but one is less dense, and larger by a factor \(k\). How do their moments of inertia compare? \(\triangleright\) (1) This is like increasing all the distances between atoms by a factor \(k\). All the \(r\)'s become greater by this factor, so the moment of inertia is increased by a factor of \(k^2\). |
4.2.4 Iterated integrals
In various places in this book, starting with subsection 4.2.5, we'll come across integrals stuck inside other integrals. These are known as iterated integrals, or double integrals, triple integrals, etc. Similar concepts crop up all the time even when you're not doing calculus, so let's start by imagining such an example. Suppose you want to count how many squares there are on a chess board, and you don't know how to multiply eight times eight. You could start from the upper left, count eight squares across, then continue with the second row, and so on, until you how counted every square, giving the result of 64. In slightly more formal mathematical language, we could write the following recipe: for each row, \(r\), from 1 to 8, consider the columns, \(c\), from 1 to 8, and add one to the count for each one of them. Using the sigma notation, this becomes
If you're familiar with computer programming, then you can think of this as a sum that could be calculated using a loop nested inside another loop. To evaluate the result (again, assuming we don't know how to multiply, so we have to use brute force), we can first evaluate the inside sum, which equals 8, giving
Notice how the “dummy” variable \(c\) has disappeared. Finally we do the outside sum, over \(r\), and find the result of 64.
Now imagine doing the same thing with the pixels on a TV screen. The electron beam sweeps across the screen, painting the pixels in each row, one at a time. This is really no different than the example of the chess board, but because the pixels are so small, you normally think of the image on a TV screen as continuous rather than discrete. This is the idea of an integral in calculus. Suppose we want to find the area of a rectangle of width \(a\) and height \(b\), and we don't know that we can just multiply to get the area \(ab\). The brute force way to do this is to break up the rectangle into a grid of infinitesimally small squares, each having width \(dx\) and height \(dy\), and therefore the infinitesimal area \(dA = dx dy\). For convenience, we'll imagine that the rectangle's lower left corner is at the origin. Then the area is given by this integral:
Notice how the leftmost integral sign, over \(y\), and the rightmost differential, \(dy\), act like bookends, or the pieces of bread on a sandwich. Inside them, we have the integral sign that runs over \(x\), and the differential \(dx\) that matches it on the right. Finally, on the innermost layer, we'd normally have the thing we're integrating, but here's it's 1, so I've omitted it. Writing the lower limits of the integrals with \(x=\) and \(y=\) helps to keep it straight which integral goes with with differential. The result is
| Example 18: Area of a triangle |
|---|
| \(\triangleright\) Find the area of a 45-45-90 right triangle having legs \(a\). \(\triangleright\) Let the triangle's hypotenuse run from the origin to the point \((a,a)\), and let its legs run from the origin to \((0,a)\), and then to \((a,a)\). In other words, the triangle sits on top of its hypotenuse. Then the integral can be set up the same way as the one before, but for a particular value of \(y\), values of \(x\) only run from 0 (on the \(y\) axis) to \(y\) (on the hypotenuse). We then have \[\begin{align*} \text{area} &= \int_{y=0}^a \int_{x=0}^y dA \\ &= \int_{y=0}^a \int_{x=0}^y dx dy \\ &= \int_{y=0}^a \left(\int_{x=0}^y dx\right) dy \\ &= \int_{y=0}^a y dy \\ &= \frac{1}{2}a^2 \end{align*}\] Note that in this example, because the upper end of the \(x\) values depends on the value of \(y\), it makes a difference which order we do the integrals in. The \(x\) integral has to be on the inside, and we have to do it first. |
| Example 19: Volume of a cube |
|---|
| \(\triangleright\) Find the volume of a cube with sides of length \(a\). \(\triangleright\) This is a three-dimensional example, so we'll have integrals nested three deep, and the thing we're integrating is the volume \(dV = dx dy dz\). \[\begin{align*} \text{volume} &= \int_{z=0}^a \int_{y=0}^a \int_{x=0}^a dx dy dz \\ &= \int_{z=0}^a \int_{y=0}^a a dy dz \\ &= a \int_{z=0}^a \int_{y=0}^a dy dz \\ &= a \int_{z=0}^a a dz \\ &= a^3 \end{align*}\] |
| Example 20: Area of a circle |
|---|
| \(\triangleright\) Find the area of a circle. \(\triangleright\) To make it easy, let's find the area of a semicircle and then double it. Let the circle's radius be \(r\), and let it be centered on the origin and bounded below by the \(x\) axis. Then the curved edge is given by the equation \(r^2=x^2+y^2\), or \(y=\sqrt{r^2-x^2}\). Since the \(y\) integral's limit depends on \(x\), the \(x\) integral has to be on the outside. The area is \[\begin{align*} \text{area} &= \int_{x=-r}^r \int_{y=0}^{\sqrt{r^2-x^2}} dy dx\\ &= \int_{x=-r}^r \sqrt{r^2-x^2} dx\\ &= r \int_{x=-r}^r \sqrt{1-(x/r)^2} dx . \\ \text{Substituting $u=x/r$,} \\ \text{area} = r^2 \int_{u=-1}^1 \sqrt{1-u^2} du \\ \end{align*}\] The definite integral equals \(\pi\), as you can find using a trig substitution or simply by looking it up in a table, and the result is, as expected, \(\pi r^2/2\) for the area of the semicircle. |
4.2.5 Finding moments of inertia by integration
When calculating the moment of inertia of an ordinary-sized object with perhaps \(10^{26}\) atoms, it would be impossible to do an actual sum over atoms, even with the world's fastest supercomputer. Calculus, however, offers a tool, the integral, for breaking a sum down to infinitely many small parts. If we don't worry about the existence of atoms, then we can use an integral to compute a moment of inertia as if the object was smooth and continuous throughout, rather than granular at the atomic level. Of course this granularity typically has a negligible effect on the result unless the object is itself an individual molecule. This subsection consists of three examples of how to do such a computation, at three distinct levels of mathematical complication.
Moment of inertia of a thin rod
What is the moment of inertia of a thin rod of mass \(M\) and length \(L\) about a line perpendicular to the rod and passing through its center? We generalize the discrete sum
In this example the object was one-dimensional, which made the math simple. The next example shows a strategy that can be used to simplify the math for objects that are three-dimensional, but possess some kind of symmetry.
Moment of inertia of a disk
What is the moment of inertia of a disk of radius \(b\), thickness \(t\), and mass \(M\), for rotation about its central axis?
We break the disk down into concentric circular rings of thickness \(dr\). Since all the mass in a given circular slice has essentially the same value of \(r\) (ranging only from \(r\) to \(r+dr\)), the slice's contribution to the total moment of inertia is simply \(r^2dm\). We then have
where \(V=\pi b^2 t\) is the total volume, \(\rho=M/V=M/\pi b^2 t\) is the density, and the volume of one slice can be calculated as the volume enclosed by its outer surface minus the volume enclosed by its inner surface, \(dV= \pi (r+dr)^2 t - \pi r^2 t = 2\pi tr dr\).
In the most general case where there is no symmetry about the rotation axis, we must use iterated integrals, as discussed in subsection 4.2.4. The example of the disk possessed two types of symmetry with respect to the rotation axis: (1) the disk is the same when rotated through any angle about the axis, and (2) all slices perpendicular to the axis are the same. These two symmetries reduced the number of layers of integrals from three to one. The following example possesses only one symmetry, of type (2), and we simply set it up as a triple integral. You may not have seen multiple integrals yet in a math course. If so, just skim this example.
Moment of inertia of a cube
What is the moment of inertia of a cube of side \(b\), for rotation about an axis that passes through its center and is parallel to four of its faces? Let the origin be at the center of the cube, and let \(x\) be the rotation axis.
The fact that the last step is a trivial integral results from the symmetry of the problem. The integrand of the remaining double integral breaks down into two terms, each of which depends on only one of the variables, so we break it into two integrals,
which we know have identical results. We therefore only need to evaluate one of them and double the result:
Figure h shows the moments of inertia of some shapes, which were evaluated with techniques like these.
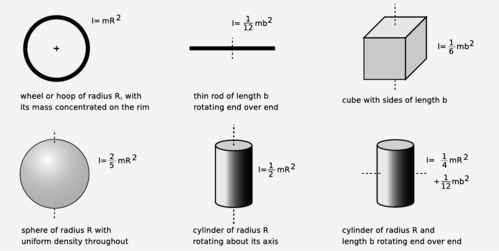
h / Moments of inertia of some geometric shapes.
Example \(\PageIndex{9}\): The hammer throw
\(\triangleright\) In the men's Olympic hammer throw, a steel ball of radius 6.1 cm is swung on the end of a wire of length 1.22 m. What fraction of the ball's angular momentum comes from its rotation, as opposed to its motion through space?
\(\triangleright\) It's always important to solve problems symbolically first, and plug in numbers only at the end, so let the radius of the ball be \(b\), and the length of the wire \(\ell\). If the time the ball takes to go once around the circle is \(T\), then this is also the time it takes to revolve once around its own axis. Its speed is \(v=2\pi\ell/T\), so its angular momentum due to its motion through space is \(mv\ell=2\pi m\ell^2/T\). Its angular momentum due to its rotation around its own center is \((4\pi/5)mb^2/T\). The ratio of these two angular momenta is \((2/5)(b/\ell)^2=1.0\times10^{-3}\). The angular momentum due to the ball's spin is extremely small.
Example \(\PageIndex{10}\): Toppling a rod
\(\triangleright\) A rod of length \(b\) and mass \(m\) stands upright. We want to strike the rod at the bottom, causing it to fall and land flat. Find the momentum, \(p\), that should be delivered, in terms of \(m\), \(b\), and \(g\). Can this really be done without having the rod scrape on the floor?
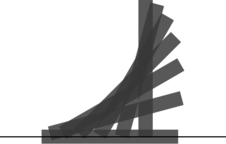
i / Example 22.
\(\triangleright\) This is a nice example of a question that can very nearly be answered based only on units. Since the three variables, \(m\), \(b\), and \(g\), all have different units, they can't be added or subtracted. The only way to combine them mathematically is by multiplication or division. Multiplying one of them by itself is exponentiation, so in general we expect that the answer must be of the form
where \(A\), \(j\), \(k\), and \(l\) are unitless constants. The result has to have units of \(\text{kg}\!\cdot\!\text{m}/\text{s}\). To get kilograms to the first power, we need
meters to the first power requires
and seconds to the power \(-1\) implies
We find \(j=1\), \(k=1/2\), and \(l=1/2\), so the solution must be of the form
Note that no physics was required!
Consideration of units, however, won't help us to find the unitless constant \(A\). Let \(t\) be the time the rod takes to fall, so that \((1/2)gt^2=b/2\). If the rod is going to land exactly on its side, then the number of revolutions it completes while in the air must be 1/4, or 3/4, or 5/4, ..., but all the possibilities greater than 1/4 would cause the head of the rod to collide with the floor prematurely. The rod must therefore rotate at a rate that would cause it to complete a full rotation in a time \(T=4t\), and it has angular momentum \(L=(\pi/6)mb^2/T\).
The momentum lost by the object striking the rod is \(p\), and by conservation of momentum, this is the amount of momentum, in the horizontal direction, that the rod acquires. In other words, the rod will fly forward a little. However, this has no effect on the solution to the problem. More importantly, the object striking the rod loses angular momentum \(bp/2\), which is also transferred to the rod. Equating this to the expression above for \(L\), we find \(p=(\pi/12)m\sqrt{bg}\).
Finally, we need to know whether this can really be done without having the foot of the rod scrape on the floor. The figure shows that the answer is no for this rod of finite width, but it appears that the answer would be yes for a sufficiently thin rod. This is analyzed further in homework problem 37 on page 294.
Contributors
Benjamin Crowell (Fullerton College). Conceptual Physics is copyrighted with a CC-BY-SA license.