
6: C6) Conservation of Angular Momentum I
- Page ID
- 63157
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- 6.3: Examples
- In the absence of external torques, a system’s total angular momentum is conserved. The angular velocity is inversely proportional to the moment of inertia, so if the moment of inertia decreases, the angular velocity must increase to conserve angular momentum. Systems containing both point particles and rigid bodies can be analyzed using conservation of angular momentum. The angular momentum of all bodies in the system must be taken about a common axis.
In this chapter we are going to move away from linear motion and start talking about angular motion. Fortunately, the physics here is exactly the same - angular momentum is conserved in precisely the way that linear momentum is conserved. However, angular momentum is often more confusing for students to deal with. This is actually very understandable, since it requires a few extra notions, as well as being something that we don't experience quite as often in real life. So in this introduction we are going to focus on some of the basic variables used to describe circular motion and momentum, and leave details about the conservation laws to later in the chapter.
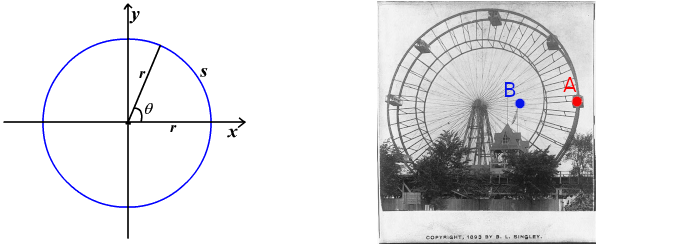
Just like we measured linear motion with a change in linear position \(\Delta\vec{r}\), we'd like to describe rotational motion with a change in angular position, \(\Delta \vec{\theta}\). You should be familiar with how to measure an angle \(\theta\) (see the left picture below), but the units we use turn out to be important. The physical (S.I.) unit that corresponds to an angle measure is the radian, and is defined (again, see the figure) as
\[\theta = \frac{s}{r},\]
where \(s\) is the arclength and \(r\) is the radius of the circle in question. It's easy to see then how many radians are in an entire circle, since that corresponds to an arclength of \(s=2\pi r\), so \(\theta= 2 \pi r / r = 2\pi\). Of course, there is no problem with saying "an object is rotating at 3 revolutions per minute" - that's still a valid angular speed, it's just not in SI units. If we were going to calculate something, we would want to convert that into radians per second; let's do that real quick as an example:
\[\frac{3\text{ rev}}{1 \text{ min}}\left(\frac{2\pi\text{ rad}}{1\text{ rev}}\right)\left(\frac{1\text{ min}}{60\text{ sec}}\right)\simeq 0.314\text{ rad/s}.\]
The conversion factors here are represented as factors that you multiply the initial value by - there are \(2 \pi\) radians in one revolution, and 60 seconds in one minute.
So now that we know how to measure the angular position, how do we find the angular version of linear velocity, \(\vec{v}=\Delta \vec{r} / \Delta t\)? That's simple, since we are now just measuring the displacements in angles, and we get angular velocity1 \(\vec{\omega} = \Delta \vec{\theta} / \Delta t\). The rotational speed \(\omega\) is defined the same way as the linear speed, as the magnitude of this vector quantity.
So that seems easy enough, but the challenge comes when we try to go back and forth between linear and rotational quantities. Let's try to do this with the ferris wheel shown in the figure on the right. This is "The Great Ferris Wheel", built for the 1893 World's Fair, and is 140 feet (43 m) in radius. When we say "the wheel is moving at an angular speed of 1 rotation a minute", that applies to the entire object - specifically, points A and B (which is halfway out to the edge) have the same angular speed (why?). The same is not true of the linear speeds of different points on the wheel. For example, over one rotation, point A travels a distance \(2 \pi (43\text{ m})\sim 270 \text{ m}\), while point B travels \(2 \pi (43/2 \text{ m})\sim135\text{ m}\). Therefore, the linear speed of A is greater then the linear speed of B, because A is traveling a longer distance! We picked one rotation for convenience, but it would apply equally to any time period you chose.
1Notice that we haven't talked about how to assign a direction to this velocity - all velocities have directions! You do this with "the right hand rule", which we will talk about later in this chapter.