
11.5ii: Heavy damping- γ>2ω0



- Last updated
- Aug 8, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
The motion is given by Equations 11.5.4 and 11.5.6 where, this time, k1 and k2 are each real and negative. For convenience, I am going to write λ1=−k1 and λ2=−k2. λ1 are λ2 both real and positive, with λ2 > λ1 given by
λ1=12γ−√(12γ)2−ω20,λ2=12γ+√(12γ)2−ω20
The general solution for the displacement as a function of time is
x=Ae−λ1t+Be−λ2t.
The speed is given by
˙x=−Aλ1e−λ1t−Bλ2e−λ2t.
The constants A and B depend on the initial conditions. Thus:
x0=A+B
and
(˙x)0=−(Aλ1+Bλ2).
From these, we obtain
A=(˙x)0+λ2x0λ2−λ1,B=−[(˙x)0+λ1x0λ2−λ1].
x0≠0,(˙x)0=0.
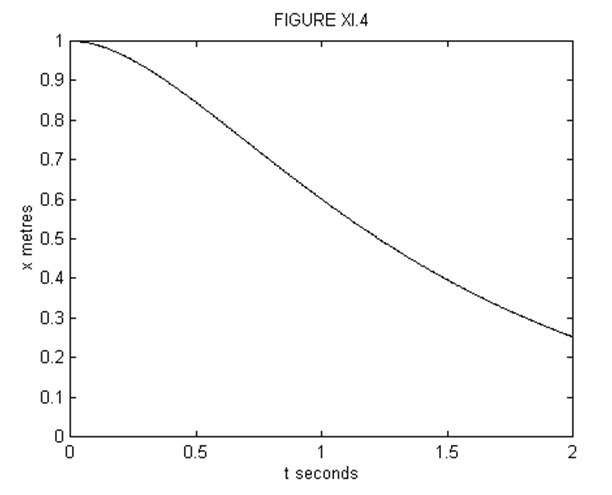
x=x0λ2−λ1(λ2e−λ1t−λ1e−λ2t).
Figure XI.4 shows x:t for x0 = 1 m, λ1 = 1 s-1, λ2 = 2 s-1.
The displacement will fall to half of its initial value at a time given by putting xx0=12 in Equation 11.5.25. This will in general require a numerical solution. In our example, however, the equation reduces to 12=2e−t−e−2t and if we let u=e−t, this becomes u2−2u+12=0. The two solutions of this are u=1.707107 or 0.292893. The first of these gives a negative t, so we want the second solution, which corresponds to t=1.228 seconds.
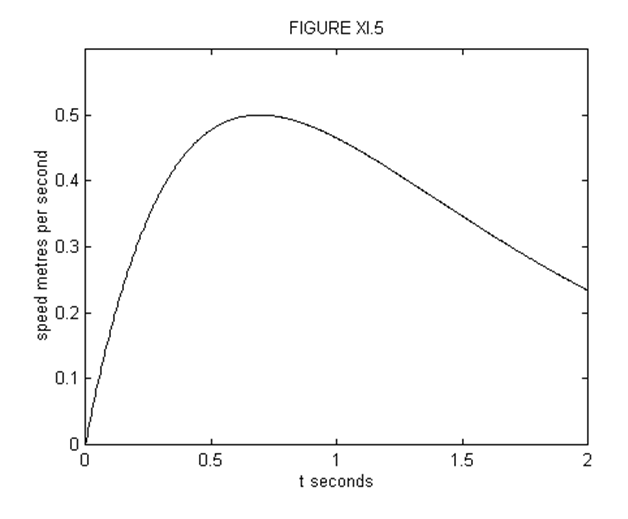
The velocity as a function of time is given by
˙x=−λ1λ2x0λ2−λ1(e−λ1t−eλ2t).
This is always negative. In figure XI.5, is shown the speed, which is |˙x| as a function of time, for our numerical example. Those who enjoy differentiating can show that the maximum speed is reached in a time −˙x and that the maximum speed is λ1λ2x0λ2−λ1[(λ1λ2)λ2λ2−λ1−(λ1λ2)λ1λ2−λ1]. (Are these dimensionally correct?) In our example, the maximum speed, reached at t=ln2=0.6931 seconds, is 0.5 m s-1.
x0=0,(˙x)0=V(>0).
In this case it is easy to show that
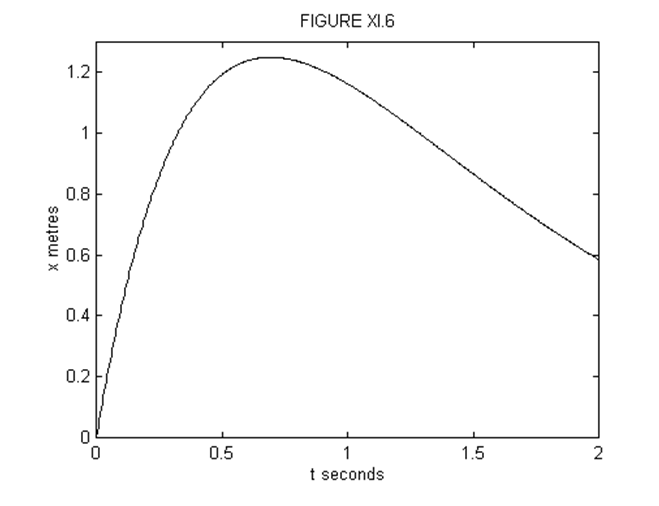
x=Vλ2−λ1(e−λ1t−e−λ2t).
It is left as an exercise to show that x reaches a maximum value of Vλ2(λ1λ2)λ1λ2−λ1 when t=ln(λ2λ1)λ2−λ1. Figure XI.6 illustrates Equation 11.5.26a for λ1 = 1 s-1, λ2 = 2 s-1, V = 5 m s-1. The maximum displacement of 1.25 m is reached when t=ln2=0.6831 s. It is also left as an exercise to show that equation 11.5.26a can be written
x=2Ve−12λtλ2−λ1sinh(14γ2−ω20).
x0≠0,(˙x)0=−V.
This is the really exciting example, because the suspense-filled question is whether the particle will shoot past the origin at some finite time and then fall back to the origin; or whether it will merely tamely fall down asymptotically to the origin without ever crossing it. The tension will be almost unbearable as we find out. In fact, I cannot wait; I am going to plot x versus t in figure XI.7 for λ1 = 1 s-1, λ2 = 2 s -1, x0 = 1 m, and three different values of V, namely 1, 2 and 3 m s-1.
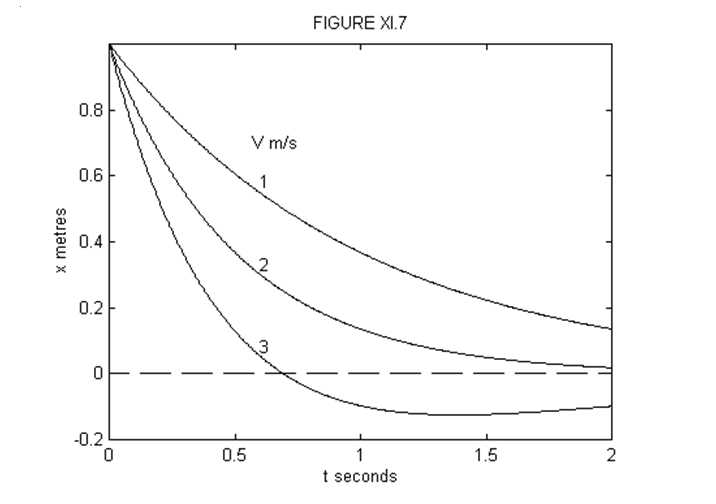
We see that if V = 3 m s-1 the particle overshoots the origin after about 0.7 seconds. If V = 1 m s-1, it does not look as though it will ever reach the origin. And if V = 2 m s-1, I'm not sure. Let's see what we can do. We can find out when it crosses the origin by putting x= 0 in Equation 11.5.20, where A and B are found from Equations 11.5.24 with (˙x)0=−V. This gives, for the time when it crosses the origin,
t=1λ2−λ1ln(V−λ1x0V−λ2x0).
Since λ2>λ1, this implies that the particle will overshoot the origin if V>λ2x0, and this in turn implies that, for a given V, it will overshoot only if
γ<V2x20+ω20Vx0.
For our example, λ2x0= 2 m s-1, so that it just fails to overshoot the origin if V= 2 m s-1. For V = 3 m s-1, it crosses the origin at t=ln2=0.6931 s. In order to find out how far past the origin it goes, and when, we can do this just as in
I make it that it reaches its maximum negative displacement of -0.125 m at t=ln4=1.386 s.