
03. Rotating and Translating




- Last updated
- Oct 1, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Rotating and Translating
Accelerating from rest, a Cadillac Sedan de Ville can reach a speed of 25 m/s in a time of 6.2 s. During this acceleration, the Cadillac's tires do not slip in their contact with the road. The diameter of the Cadillac's tires is 0.80 m.
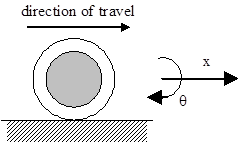
Let's examine the motion of one of the Cadillac's tires. Obviously, the tire both translates and rotates. We will imagine the motion to be a superposition of a pure translation of the CM of the tire and a pure rotation about the CM of the tire.
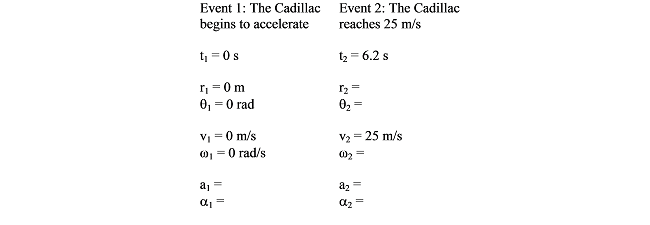
To analyze the situation, we should define the sequence of events that take place and tabulate what we know about the motion at each event. Since we are dealing with translation as well as rotation, we will need to keep track of both the linear kinematic variables and the angular kinematic variables.
Let's take the positive x direction to be the direction that the Cadillac translates and the positive q direction to be the direction in which the tires rotate.
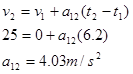
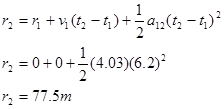
First, let's examine the translational portion of the tire's motion.
What about the rotational kinematics of the tire? The motion of the tire is the superposition of the pure translational motion of the CM and the pure rotational motion about the CM1

where r is the distance between the point of interest and the rotation axis, i.e., the distance from the CM.
The key insight into studying the rotation of the tire is to realize that at any instant the velocity of the point on the tire in contact with the road is zero because the tire never slips in its contact with the road. Thus, if the CM of the tire is moving forward at
the point on the bottom of the tire must be moving backward relative to the ground to be zero! Thus, only a very particular value for w will allow the tire to roll without slipping.
From above,
At the bottom of the tire,  , since motion tangent to the tire at the bottom of the tire is motion to the left. Thus,
, since motion tangent to the tire at the bottom of the tire is motion to the left. Thus,
Therefore, at the end of the acceleration, the tire has an angular speed of 62.5 rad/s.
I included all of the vector notation to ensure I did the calculation correctly, but hopefully we can understand the result without getting bogged down in notation. Basically, the bottom of the tire can't be moving relative to the ground if the wheel rolls without slipping. Since the CM of the tire is moving forward at 25 m/s, the bottom of the tire must be moving backward at 25 m/s relative to the CM. From the CM frame of reference, the tire is just spinning, and I can apply v = r w to calculate the angular speed of the tire.
We can find the angular acceleration and angular position of the tire by using the linear variables determined above and the method described in the previous example, or by using the equations for constant angular acceleration.
Thus, the wheel rotates through 194 rad, or 30.8 revolutions, while accelerating.
[1]As stated in the text, to describe the general motion of the tire we will break the motion down into a pure translation of the CM and a pure rotation about the CM. Another way to envision the motion is that the tire is rotating about the point on the tire in contact with the ground. The rotation axis of the tire passes through this contact point. (Imagine the point on the tire in contact with the ground as being glued to the ground and the tire rotating about it.) However, an instant later this point is no longer in contact with the ground, and the rotation axis passes through the next point on the tire in contact with the ground. There are advantages and disadvantages to both conceptualizations of the tire’s motion, however, we will restrict ourselves to the view that the tire undergoes pure rotation about the CM.