
5.9: Precession and Nutation
- Page ID
- 17611

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The action of a torque causes a change in angular momentum, as expressed by Equation 5.7.1. A special case arises when the torque is perpendicular to the angular momentum: in that case the change affects only the direction of the angular momentum vector, not its magnitude. Since the torque is given by the cross product of the arm and the force, this case arises when the angular momentum is parallel to either arm or force, or more generally, lies in the plane spanned by the force and arm. As a result, the angular momentum vector may start rotating about a fixed axis, a process known as precession. Due to the action of a second force (with associated torque), the angle between the angular momentum vector and the fixed axis (which we’ll call the z-axis) may also change, a process known as nutation.
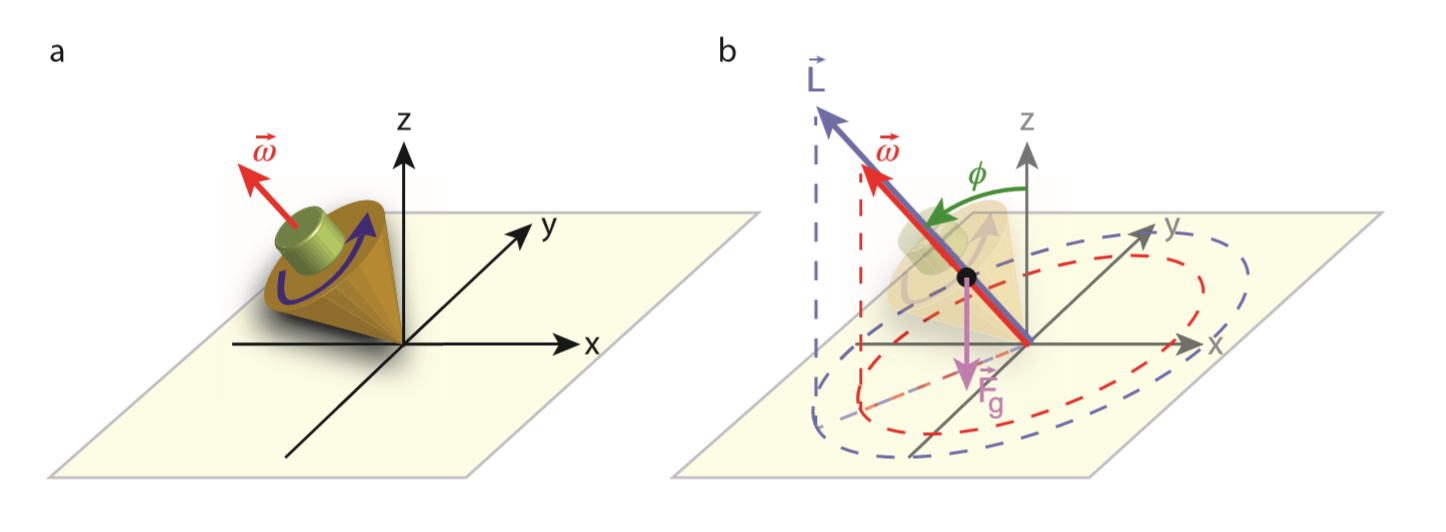
The simplest example of a precessing system is that of a rotationally symmetric top, spinning about an axis that is not the vertical z-axis, (Figure \(\PageIndex{1}\)). In this case, the arm of gravitational force (pointing from the pivot at the origin to the center of mass of the top) is parallel to the angular momentum, which itself is parallel to the rotation vector, as \(\boldsymbol{L}=I \boldsymbol{\omega}\). The torque of gravity is thus perpendicular to the angular momentum. If we call the angle between \(\boldsymbol{L}\) and the z-axis \(\phi\), and work in cylindrical coordinates \((\rho, \theta, z)\), we can write \(\boldsymbol{L}=L_{x y} \hat{\boldsymbol{\rho}}+L_{z} \hat{z}, \text { where } L_{x y}=L \sin \phi\) is the projection of \(\boldsymbol{L}\) on the xy-plane, and \(\hat{\boldsymbol{\rho}}\) is the radial unit vector in the xy-plane (i.e., \(\hat{\boldsymbol{\rho}}=\cos \theta \hat{\boldsymbol{x}}+\sin \theta \hat{\boldsymbol{y}}\)). The gravitational torque is then given by:
\[\boldsymbol{\tau}_{\mathrm{Z}}=\boldsymbol{r} \times \boldsymbol{F}_{\mathrm{Z}}=m g r \sin \phi \hat{\boldsymbol{\theta}} \label{gravtorque}\]
where \(\boldsymbol{r}\) is the arm pointing from the origin to the center of mass, r its length, and \(\hat{\boldsymbol{\theta}}\) the angular unit vector in the xy-plane (i.e., \(\hat{\boldsymbol{\theta}}=-\sin \theta \hat{\boldsymbol{x}}+\cos \theta \hat{\boldsymbol{y}}\)). For the time derivative of \(\boldsymbol{L}\), we get:
\[\frac{\mathrm{d} \boldsymbol{L}}{\mathrm{d} t}=\frac{\mathrm{d} L_{x y}}{\mathrm{d} t} \hat{\boldsymbol{\rho}}+L_{x y} \dot{\theta} \hat{\boldsymbol{\theta}}+\frac{\mathrm{d} L_{z}}{\mathrm{d} t} \hat{\boldsymbol{z}} \label{dLdt}\]
where we used (Equation A.8)
\[\frac{\mathrm{d} \hat{\boldsymbol{\rho}}}{\mathrm{d} t}=\frac{\mathrm{d} \hat{\boldsymbol{\rho}}}{\mathrm{d} \theta} \frac{\mathrm{d} \theta}{\mathrm{d} t}=\dot{\theta} \hat{\boldsymbol{\theta}}\]
Equating \ref{gravtorque} and \ref{dLdt}, we find that \(\frac{dL_{xy}}{dt}=\frac{dL_z}{dt}=0\), and
\[\omega_{\mathrm{p}} \equiv \frac{\mathrm{d} \theta}{\mathrm{d} t}=\frac{m g r \sin \phi}{L_{x y}}=\frac{m g r}{I \omega} \label{frequency}\]
Equation \ref{frequency} gives us the frequency of the precession about the z-axis. The associated precession rotation vector is given by \(\boldsymbol{\omega}_{\mathbf{p}}=\omega_{\mathbf{p}} \hat{\boldsymbol{z}}\).
Where precession, in terms of the angles used in this section, represents a change in \(\theta\), nutation is associated with a change in the tilt angle \(\phi\). It comes about in several cases, most commonly due to the action of a second force, and often results in a periodic motion (hence the name nutation, ‘nodding’). One example is the change in the Earth’s axis. As the axis is not perpendicular to the plane of Earth’s orbit (it presently makes an angle of about 23.4◦), gravity from the sun exerts a net torque on the Earth’s rotation axis, causing it to precess with a period of about 25000 years. Consequently, the current polar star will only remain the polar star for a couple of centuries. Due to the torques exerted by the moon and the other planets, the Earth’s axis also nutates - with amplitudes from arcseconds to a few degrees, and periods that range widely, from 18.6 years due to the gravitational pull of the moon up to millennia due to other effects.