
10.4: Examples



- Last updated
- Sep 28, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
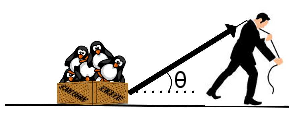
I am dragging a box full of 9 Emperor penguins along the ground as shown in the figure. Each of the penguins has a mass of 33.0 kg, and you can assume the box has zero mass. The rope which I am pulling the box with is making an angle of 22∘ with respect to the ground, and I pull the penguins a total distance of 15 m.
- If the tension in the rope is 50 N, how much work did I do on the box during this process?
- If the force due to friction between the box and ground is 25 N, how much work did friction do on the box during this process?
- How much work did gravity do on the penguins in the box during this process?
- Assuming the box of penguins starts from rest, how fast is the box moving after I pull it 15 m?
Suppose you are riding your bicycle and hit the brakes to come to a stop. Assuming no slippage between the tire and the road:
- Which force is responsible for removing your momentum? (By “you” I mean throughout “you and the bicycle.”)
- Which force is responsible for removing your kinetic energy?
Solution
(a) According to what we saw in previous chapters, for example, Equation (2.3.1)
ΔpsysΔt=Fext,net
the total momentum of the system can only be changed by the action of an external force, and the only available external force is the force of friction between the tire and the road. So it is this force that removes the forward momentum from the system. The stopping distance, Δxcm, and the force, can be related using Equation (10.3.1):
Fsr,tΔxcm=ΔKcm.
(b) Now, here is an interesting fact: the force of friction, although fully responsible for stopping your center of mass motion does no work in this case. That is because the point where it is applied—the point of the tire that is momentarily in contact with the road—is also momentarily at rest relative to the road: it is, precisely, not slipping (This in fact means the kind of friction here is static friction), so Δx in the equation W=FΔx is zero. By the time that bit of the tire has moved on, so you actually have a nonzero Δx, you no longer have an F: the force of static friction is no longer acting on that bit of the tire, it is acting on a different bit—on which it will, again, do no work, for the same reason.
So, as you bring your bicycle to a halt the work Wext,sys = 0, and it follows that the total energy of your system is, in fact, conserved: all your initial kinetic energy is converted to thermal energy by the brake pad rubbing on the wheel.