
1.32: Euclidean Geometry


- Last updated
- Jan 13, 2023
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
One of the great privileges of teaching this class is the opportunity I have to blow your minds with a radically different understanding of the nature of space and time. The shift from a Euclidean/Newtonian understanding of space and time, to a Riemannian/Einsteinian one is centrally important to our understanding of cosmology. This chapter is entirely focused on the Euclidean geometry that is familiar to you, but reviewed in a language that may be unfamiliar. The new language will help us journey into the foreign territory of Riemannian geometry where space is curved. Our exploration of that territory will then help you to drop your pre-conceived notions about space and to begin to understand the broader possibilities -- possibilities that are not only mathematically beautiful, but that appear to be realized in the natural world.
According to Euclidean geometry, it is possible to label all space with coordinates x, y, and z such that the square of the distance between a point labeled by x1, y1, z1 and a point labeled by x2, y2, z2 is given by (x1−x2)2+(y1−y2)2+(z1−z2)2. If points 1 and 2 are only infinitesimally separated, and we call the square of the distance between them dℓ2, then we could write this rule, that gives the square of the distance as
dℓ2=dx2+dy2+dz2
This rule has physical significance. The physical content is that if you place a ruler between these two points, and it is a good ruler, it will show a length of dℓ=+√dℓ2. Since it is difficult to find rulers good at measuring infinitesimal lengths, we can turn this into a macroscopic rule. Imagine a string following a path parameterized by λ, from λ=0 to λ=1, then the length of the string is ∫10dλ(dℓ/dλ). That is, every infinitesimal increment dλ corresponds to some length dℓ. If we add them all up, that's the length of the string.
Box 1.32.1
Exercise 1.1.1: Find the distance along a path from the origin to (x,y,z) = (1,1,1) where the path is given by
x(λ)=λ,y(λ)=λ,z(λ)=λ
There are many ways to label the same set of points in space. For example, we could rotate our coordinate system about the z axis by angle θ (with positive θ taken to be in the counterclockwise direction as viewed looking down toward the origin from positive z) to form a primed coordinate system with this transformation rule:
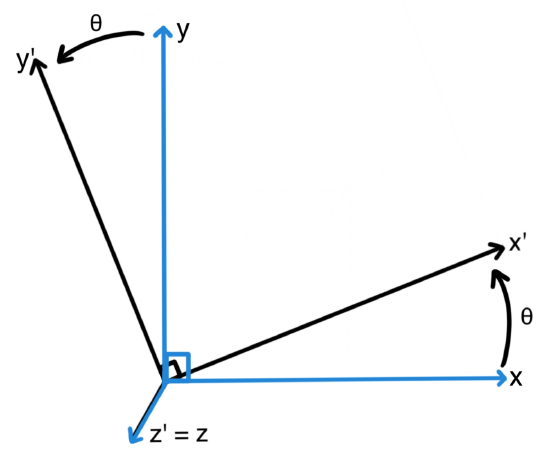 z′=z
z′=z
y′=−xsinθ+ycosθ
x′=xcosθ+ysinθ
Under such a re-labeling, the distance between points 1 and 2 is unchanged. Physically, this has to be the case. All we've done is used a different labeling system. That can't affect what a ruler would tell us about the distance between any pair of points. Further, for this particular transformation, the equation that gives us the distance between infinitesimally separated points has the same form.
Figure 1: A counterclockwise rotation of the coordinate system about the z axis by θ creates a new coordinate system which we’ve labeled with primes. The z axis comes out of the screen and is identical to the z′ axis. As is true for any point in space, point 1 can be described in either coordinate system, by specifying (x1,y1,z1) or (x′1,y′1,z′1) with the relationship between the two given by the equations to the right.
Box 1.32.2
Exercise 1.2.1: Show that the distance rule of Equation ??? applied to the prime coordinates,
(dℓ′)2=(dx′)2+(dy′)2+(dz′)2
gives the same distance; i.e, show that dℓ′=dℓ. [Warning: θ is not a coordinate here. It specifies the relationship between the coordinate systems. So, e.g., dx′=dxcosθ+dysinθ.] Because this distance is invariant under rotations of the coordinate system, we call it the invariant distance.
We want to emphasize that the labels themselves, x, y, z or x', y', z' have no physical meaning. All physical meaning associated with the coordinates comes from an equation that tells us how to calculate distances along paths. To drive this point home, note that we could also label space with a value of x, y, z at every point, but do it in such a way that we would have the distance between x, y, z and x+dx,y+dy,z+dz have a square given by
dℓ2=dx2+x2(dy2+sin2ydz2)
For many readers, this result would look more familiar if we renamed the coordinates r=x, θ=y, and ϕ=z so that we get another expression for the invariant distance,
dℓ2=dr2+r2(dθ2+sin2θdϕ2)
This is the usual spherical coordinate labeling of a 3-dimensional Euclidean space by distance from origin, r, a latitude-like angle, θ, and a longitudinal angle, ϕ. The transformation between the two coordinate systems is given by
z=rcosθ
y=rsinθsinϕ
x=rsinθcosϕ
Box 1.32.3
Exercise 1.3.1: Show that the invariant distance given by the equation dℓ2=dx2+dy2, the 2-D version of ???, and the invariant distance given by the equation dℓ2=dr2+r2dϕ2, the 2-D version of ???, are consistent if the coordinates are related via:
x=rcosϕy=rsinϕ
Hint: use the chain rule, so that, e.g., dx=drcosϕ−rsinϕdϕ. (Note that the coordinate transformation equations here are obtained from the 3-dimensional case by setting θ=π/2.)
In preparation for thinking about non-Euclidean spaces, we are going to go through how one could construct a labeling of a two-dimensional Euclidean space in polar coordinates, r, ϕ. Our construction starts with what will look like an unusual way of defining r. We define r based on the circumference of the circle rather than the distance from the origin, for reasons that will become clear later.
First we choose a center to our coordinate system. Then we label all points with r that are equidistant from that center and form a circle with circumference C=2πr. Thus to label space with the appropriate value of r, one takes a string, ties one end down at the center, and marks out all the points that can be just reached by the other end of the string, when it is pulled straight. Then one measures the circumference of the resulting circle and labels the points on this circle with a value of r given by r=C/(2π). We take strings of varying lengths and repeat again and again to figure out the value of r for every point in the plane.
Next, to label space with ϕ, we take one point on one of the circles and arbitrarily label that one as ϕ=0. We pull a string tight from the origin out to this point and beyond, and label all the points along the string with ϕ=0. We then march outward from the origin and when we get to a point labeled with radial value r, we make a 90∘ turn to the left and advance some small distance Δ. We then label this point with ϕ=Δ/r. Again we pull a string tight from the origin out to this point and beyond, and label all these points along the string with the same value of ϕ. We then advance another Δ around the circle and repeat, now labeling the nth iteration with ϕ=nΔ/r. In this manner we label all points in the space with values of ϕ. Note that when we have done this 2πr/Δ times we will have advanced all the way around the circle (because we will have covered a distance of 2πr ) and the change in ϕ will be (2πr/Δ)×Δ/r=2π.
In a Euclidean space, such a construction leads us to the result (unproven here) that the distance dℓ between two infinitesimally separated points labeled by r,ϕ and r+dr,ϕ+dϕ has a square given by
dℓ2=dr2+r2dϕ2.
Note that in our construction we never made any measurement of the distance from the origin to a circle with origin as center and with circumference C=2πr. All we know so far is the circumference of the circle. To calculate the distance from the origin to this circle we can apply the above rule for a path that extends from the origin to the circle. Let's say a circle with circumference C1=2πr1.
Box 1.32.4
Exercise 1.4.1: Calculate the distance from the origin to the circle with circumference C1=2πr1. Do so along a path of constant ϕ using Eq. ???.
You should have got the unsurprising result that the distance from the origin to the circle with circumference C1=2πr1 is r1. In the next chapter this will get more interesting as we examine a space for which this is not the case. We'll see that the distance to a circle with this circumference could be more than r1 or less than r1.
We constructed our coordinate system so that as θ goes from 0 to 2π at constant r=r1 a distance is traversed of 2πr1. Let's now check that our rule for dℓ above, Eq. ??? is consistent with this construction.
Exercise 1.4.2: Show that the parameterized path r=r1,θ=λ as λ goes from 0 to 2π covers a distance of 2πr1 by integrating dℓ, as given by Eq. ???, along this path.
Before going on, we could take a little more care. We have shown that a particular path that takes us from the origin out to r=r1 at constant ϕ has distance r1. But how do we know this is the shortest path? Here we will demonstrate that there is not a shorter path; the one prescribed is the shortest path possible. To do so, we use a result from the calculus of variations. That result is as follows:
For J=∫21dμf(qi,˙qi,μ) where ˙qi≡dqi/dμ, the path from point 1 to 2 that extremizes J satisfies these equations
ddμ(∂f∂˙qi)=∂f∂qi
This is a mathematical result with more than one application. In mechanics, the action is given as an integral over the Lagrangian so that
S=∫dtL(qi,˙qi,t)
with ˙qi≡dqi/dt, and because a system passes from point 1 to point 2 along the path that minimizes the action, the path taken will satisfy
ddt(∂L∂˙qi)=∂L∂qi
which you know as the Euler-Lagrange equations.
In the case at hand we have length = ∫dμdℓdμ where
f=dℓdμ=√˙r2+r2˙ϕ2
(note the overdot is differentiation with respect to the independent variable which here is μ again) so the shortest-length path between any two points should satisfy
ddμ(∂f∂˙r)=∂f∂r
ddμ(∂f∂˙ϕ)=∂f∂ϕ
These equations are kind of hairy, if you work them out in generality. However, we are testing to see if a particular path satisfies them, the path from the origin to r=r1, and ϕ=ϕ1 that proceeds at fixed ϕ. We could parameterize this path with ϕ=ϕ1,r(μ)=μr1 with μ running from 0 to 1. Note that ˙ϕ=0 which really simplifies the evaluation of the above equations. We will just do one term out of the first equation as an example, and leave evaluation of the rest of the terms as an exercise. In particular, we evaluate ∂f/∂r=(r/f)˙ϕ2=0.
Box 1.32.5
Exercise 1.5.1: Evaluate the three other terms ( ddμ(∂f∂˙r), ddμ(∂f∂˙ϕ) and ∂f∂ϕ ) in the two equations above, and verify that the given path does indeed satisfy these equations, thereby demonstrating that it is the shortest possible path.
Summary
- Space can be labeled with coordinates. The same space can be labeled with a variety of coordinate systems; e.g., Cartesian or Spherical.
- The coordinate labelings themselves have no physical meaning. Physical meaning resides in the distances between points, which one can calculate from a rule that relates infinitesimal changes in coordinates to infinitesimal distances.
- Paths through a space can be parameterized by a single variable; we saw several examples of this.
- The Euler-Lagrange equations can be used to prove that a particular path is (or is not) one with an extreme value of distance between a pair of points on the path. Usually the extreme is a minimum rather than a maximum.
Homework Problems
Problem 1.32.1
Starting from dℓ2=dx2+dy2 prove the Pythagorean theorem that the squares of the lengths of two sides of a right triangle are equal to the square of the hypotenuse. Start off by proving it for a triangle with the right-angle vertex located at the origin, so all three vertices are at (x,y)=(0,0),(x1,0), and (0,y1). Be careful to use the distance rule to determine the length of each leg of the triangle, rather than your Euclidean intuition. Let's call the length of the side along the x-axis ℓx and similarly the other lengths ℓy and ℓh. Parameterize each path and perform the appropriate integral over the independent variable you used for the parametrization (like we did with λ in this chapter). Doing so, you should find that ℓ2h=ℓ2x+ℓ2y. Having proved the Pythagorean theorem for this specially located and oriented triangle, note that since translations and rotations of the coordinate system leave our invariant distance rule unchanged, you have effectively proved it for all right triangles.
Problem 1.32.2
Prove that the hypotenuse, the straight line from (x1,0) to (0,y1) you described in 1.1, is the shortest path between those two points.
Problem 1.32.3
Show that for a primed system that is rotated relative to the unprimed system so that
x′=xcosθ+ysinθy′=−xsinθ+ycosθ
the square of the invariant distance is unchanged; i.e., dx2+dy2=(dx′)2+(dy′)2.