
15.21: Mass
- Page ID
- 8474

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)It is well known that “in relativity” the mass of an object increases as its speed increases. This may be well known, but I am not certain that it is a very precise statement of the true situation. Or at least it is no more precise than to say that the length of a rod decreases as its speed increases. The length of a rod when referred to a frame in which it is at rest is called its proper length \( l_{0}\), and the mass of a body when referred to a frame in which it is at rest is called its rest mass \( m_{0}\), and both of these things are invariant. The length of a rod when referred to a reference frame that is moving with respect to it (i.e., in Minkowski language, its component along an inclined axis) and the mass of a body referred to a frame that is moving with respect to it may indeed be different from the proper length of the rod or the rest mass of the body.
In order to derive the FitzGerald-Lorentz contraction, we had to think about what we mean by “length” and how to measure it. Likewise, in order to derive the “relativistic increase of mass” (which may be a misnomer) we have to think about what we mean by mass and how to measure it.
The fundamental unit of mass used at present in science is the International Prototype Kilogram, a platinum-iridium alloy, held in Sèvres, Paris, France. In order to determine the mass, or inertia, of another body, we need to carry out an experiment to compare its reluctance to accelerate when a force is applied to it with the reluctance of the standard kilogram when the same force is applied. We might, for example, attach the body to a spring, stretch the spring, let go, and see how fast the body accelerates. Then we carry out the same experiment with the International Prototype Kilogram. Or we might apply an impulse (\( \int Idt\) - see Chapter 8) to the body and to the Kilogram, and measure the speed immediately after applying the impulse. This might be done, for example, but striking the body and the Kilogram with a golf club, or, for a more controlled experiment, one could press each body up against a compressed spring, release the spring, and measure the resulting speed imparted to the body and to the Kilogram. (It is probable that the International Prototype Kilogram is kept under some sort of guard, and its curators may not altogether appreciate such experiments, so perhaps these experiments had better remain Thought Experiments.) Yet another method would be to cause the body and the Kilogram to collide with each other, and to assume that the collision is elastic (no internal degrees of freedom) and that momentum (defined as the product of mass and velocity) are conserved.
All of these experiments measure the reluctance to accelerate under a force; in other words the inertia or the inertial mass or just the mass of the body.
Another possible experiment to determine the mass of the body would be to place it and the Kilogram at a measured distance from another mass (such as the Earth) and measure the gravitational force (weight) of each. One has an uneasy feeling that this sort of measurement is somehow a little different from the others, in that it isn’t a measure of inertia. Some indeed would differentiate between the inertial mass and the gravitational mass of a body, although the two are in fact observed to be strictly proportional to one another. Some would not find the proportionality between inertial and gravitational mass particularly remarkable; to others, the proportionality is a surprising fact of the profoundest significance.
In this chapter we do not deal with general relativity or with gravity, so we shall think of mass in terms of its inertia. I am going to measure the ratio of two masses (one of which might be the International Prototype Kilogram) by allowing them to collide, and their masses are to be defined by assuming that the momentum of the system is conserved in all uniformly moving reference frames.
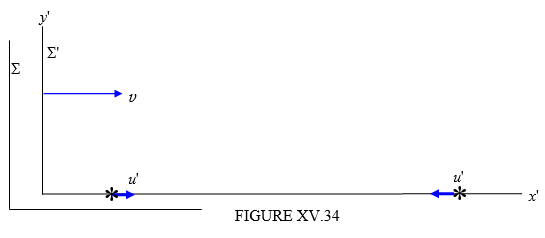
Figure XV.34 shows two references frames, \( \Sigma\) and \( \Sigma'\), the latter moving to the right at speed \( v\) relative to the former. Two bodies, of identical masses in \( \Sigma'\) (i.e. referred to the frame \( \Sigma'\)), are moving at speed \( u'\) in \( \Sigma'\), one of them to the right, the other to the left. Their mutual centre of mass is stationary in \( \Sigma'\).
Now let us refer the situation to the frame \( \Sigma\) (see figure XV.35).
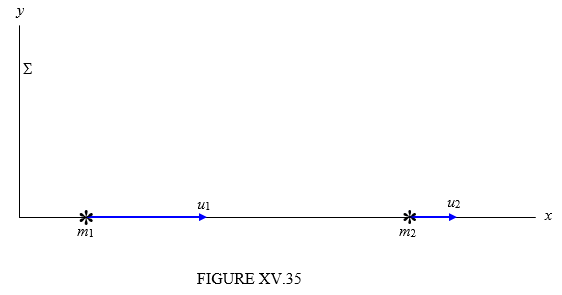
The total momentum of the system in \( \Sigma\) is \( m_{1}u_{1}+m_{2}u_{2}\). But the centre of mass (which is stationary in \( \Sigma'\)) is moving to the right in \( \Sigma\) with speed \( v\). Therefore the momentum is also \( (m_{1}+m_{2})v\). If they stick together upon collision, we are left with a single particle of mass \( m_{1}+m_{2}\) moving at speed \( v\), and, because there are no external forces, the momentum is conserved. In any case, whether the collision is elastic or not, we have
\[ m_{1}u_{1}+m_{2}u_{2}=(m_{1}+m_{2}). \label{15.21.1} \]
But
\[ u_{1}=\frac{u'+v}{1+\frac{u'v}{c^{2}}} \label{15.21.2a}\tag{15.21.2a} \]
and
\[ u_{2}=\frac{-u'+v}{1-\frac{u'v}{c^{2}}} \label{15.21.2b}\tag{15.21.2b} \]
Our aim is to try to find a relation between the masses and speeds referred to \( \Sigma\). Therefore we must eliminate \( v\) and \( u'\) from Equations \( \ref{15.21.1}\), \( \ref{15.21.2a}\) and \( \ref{15.21.2b}\). This can be a bit fiddly, but the algebra is straightforward, and I leave it to the reader to show that the result is
\[ \frac{m_{1}}{m_{2}}=\sqrt{\frac{1-\frac{u_{2}^{2}}{c^{2}}}{1-\frac{u_{1}^{2}}{c^{2}}}} \label{15.21.3} \]
This tells us that the mass \( m\) of a body referred to \( \Sigma\) is proportional to \( \frac{1}{\sqrt{1-\frac{u^{2}}{c^{2}}}}\), where \( u\) is its speed referred to \( \Sigma\). If we call the proportionality constant \( m_{0}\), then
\[ m=\frac{m_{0}}{\sqrt{1-\frac{u^{2}}{c^{2}}}} \label{15.21.4} \]
If \( u=0\), then \( m=m_{0}\), and \( m_{0}\) is called the rest mass, and it is the mass when referred to a frame in which the body is at rest. The mass \( m\) is generally called the relativistic mass, and it is the mass when referred to a frame in which the speed of the body is \( u\).
Equation \( \ref{15.21.4}\) gives the mass referred to \( \Sigma\) assuming that the mass is at rest in \( \Sigma'\). But what if the mass is not at rest in \( \Sigma'\)?
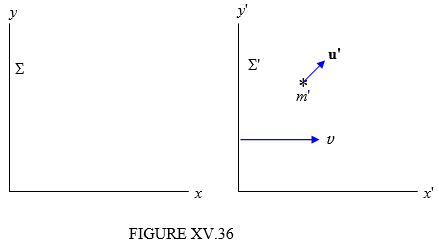
In figure XV.36 we see a mass \( m'\) moving with velocity \( \bf{u'}\) in \( \Sigma'\). Referred to \( \Sigma\) its mass will be \( m\), where
\[ \frac{m}{m'}=\sqrt{\frac{1-\frac{u'^{2}}{c^{2}}}{1-\frac{u^{2}}{c^{2}}}}. \label{15.21.5} \]
Its velocity \( \bf{u}\) will be in a different direction (referred to \( \Sigma\)) from the direction of \( \bf{u'}\) in \( \Sigma'\), and the speed will be given by
\[ u^{2}=u_{x}^{2}+u_{y}^{2} \label{15.21.6} \]
where \( u_{x}\) and \( u_{y}\) are given by Equations 15.16.2 and 15.16.3. Substitute Equations \( \ref{15.21.6}\), 15.16.2 and 15.16.3 into Equation \( \ref{15.21.5}\). The objective is to replace \( u\) entirely by primed quantities. The algebra is slightly boring, but it is worth persisting. You will find that \( u'^{2}_{y'}\) appears when you use Equation 15.16.3. Replace that by \( u'^{2}-u_{x'}'^{2}\). Also write \( \frac{1}{\left(1-\frac{v^{2}}{c^{2}}\right)}\) for \( \gamma^{2}\). After a little while you should arrive at
\[ \frac{m}{m'}=\gamma\left(1+\frac{vu'_{x'}}{c^{2}}\right). \label{15.21.7} \]
The transformation for mass between the two frames depends only on the \( x'\) component of its velocity in \( \Sigma'\). It would have made no difference, other than to increase the tedium of the algebra, if I had added \( +u_{z}^{2}\) to the right hand side of Equation \( \ref{15.21.6}\).
The inverse of Equation \( \ref{15.21.7}\) is found in the usual way by interchanging the primed and unprimed quantities and changing the sign of \( v\):
\[ \frac{m'}{m}=\gamma\left(1-\frac{vu_{x}}{c^{2}}\right). \label{15.21.8} \]
Example.
Let’s return to the problem of the dachshund that we met in Section 15.16. A railway train \( \Sigma'\) is trundling along at a speed \( \frac{v}{c}\) = 0.9 (\( \gamma\) = 2.294). The dachshund is waddling towards the front of the train at a speed \( \frac{u'_{x'}}{c}\). In the reference frame of the train \( \Sigma'\) the mass of the dog is \( m'\) = 8 kg. In the reference frame of the railway station, the mass of the dog is given by Equation \( \ref{15.21.7}\) and is 31.6 kg. (Its length is also much compressed, so it is very dense when referred to \( \Sigma\) and is disc-shaped.)
I leave it to the reader to show that the rest mass of the dog is 4.8 kg.