
16.9: Floating Bodies
- Page ID
- 8493

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)This is the most grisly topic in hydrostatics.
We can start with an observation that we have already made in Section 16.7, namely that, if a body is freely floating, the hydrostatic upthrust is equal to the weight of the body.
I also introduce here the term centre of buoyancy, which is the centre of mass of the displaced fluid. In a freely-floating body in equilibrium, the centre of buoyancy is vertically below the centre of mass of the floating body. As far as calculating the moment about some axis of the hydrostatic upthrust is concerned, the upthrust can be considered to act through the centre of buoyancy, just as the weight of an object can be considered to act through its centre of mass. See Section 1.1 of Chapter 1, for example, for a discussion of this point.
Also, before we get going, here is another small problem.
The drawing shows a body, whose relative density (i.e. its density relative to that of the fluid that it is floating in) is \( s_{1}\). The dashed line is the water-line section.
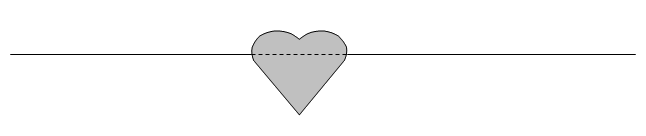
Now, in the next drawing, a body of exactly the same size and shape (but not necessarily the same density) is floating upside down, with the same water-line section.

What is the relative density of this second body?
- Answer
-
Let us establish some notation.
\( V\) = total volume of each body
\( fV\) = volume of liquid displaced by the first body (i.e. volume below the waterline in the first drawing)
\( (1-f)V\) = volume of liquid displaced by the second body (i.e. volume below the waterline in the second drawing)
\( \rho_{0}\) = density of liquid
\( \rho_{1}\) = density of first body = \( s_{1}\rho_{0}\)
\( \rho_{2}\) = density of first body = \( s_{2}\rho_{0}\)
\( \text{g}\) = gravitational acceleration
Now:
Weight of first body = weight of liquid displaced: \( V\rho_{1}\text{g}=fV\rho_{0}\text{g}\) I.e. \( s_{1}=f\)
Weight of second body = weight of liquid displaced: \( V\rho_{2}\text{g}=(1-f)V\rho_{0}\text{g}\) I.e. \( s_{2}=f\)
Hence \( \underline{\underline{s_{2}=f}}\).
I want to look now at the stability of equilibrium of a freely-floating body. While at first sight this may not be a very interesting topic, if you ever happen to be a passenger on an ocean liner, you might then find it to be quite interesting, for you will be interested to know, if the liner is given a small angular displacement from the vertical position, whether it will capsize and throw you into the sea, or whether it will right itself. Under such circumstances it becomes a very interesting subject indeed.
Before I start, I just want to establish one small geometric result.
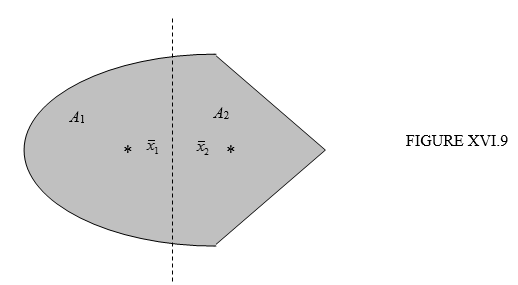
Figure XVI.9 shows a plane bilaterally-symmetric area. I have drawn a dashed line through the centroid of the area. The areas to the left and right of this line are \( A_{1}\) and \( A_{2}\), and I have indicated the positions of the centroids of these two areas. (I haven’t calculated the positions of the three centroids accurately – I just drew them approximately where I thought they would be.) Note that, since the dashed line goes through the centroid of the whole area, \( A_{1}\overline{x}_{1}=A_{2}\overline{x}_{2}\). Now rotate the area about the dashed line through an angle \( \theta\). By the theorem of Pappus (see Chapter 1, Section 1.6), the volume swept out by \( A_{1}\) is \( A_{1}\times\overline{x}_{1}\theta\) and the volume swept out by \( A_{2}\) is \( A_{2} \times \overline{x}_{2} \theta\). Thus we have established the geometrical result that I wanted, namely, that when a bilaterally symmetric area is rotated about an axis perpendicular to its axis of symmetry and passing through its centroid, the areas to left and right of the axis of rotation sweep out equal volumes.
We can now return to floating bodies, and I am going to consider the stability of equilibrium of a bilaterally symmetric floating body to a rotational displacement about an axis lying in the water line section and perpendicular to the axis of symmetry.
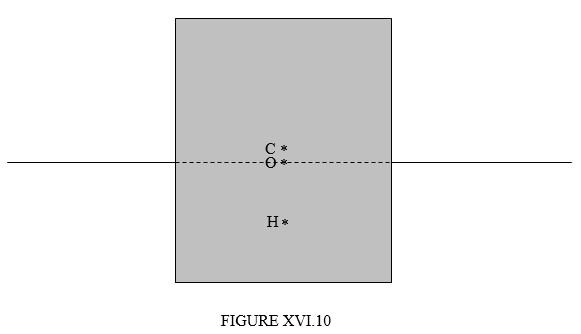
I have drawn in figure XVI.10 the centre of mass C of the whole body, the centre of buoyancy H, and the centroid of the water-line section. The body is bilaterally symmetric about the plane of the paper, and we are going to rotate the body about an axis through O perpendicular to the plane of the paper, and we want to know whether the equilibrium is stable against such an angular displacement. We are going to rotate it in such a manner that the volume submerged is unaltered by the rotation – which means that the hydrostatic upthrust will remain equal to the weight of the body, and there will be no vertical acceleration. The geometrical theorem that we have just established shows that, if we rotate the body about an axis through the centroid of the water-line section, the volume submerged will be constant; conversely, our condition that the volume submerged is constant implies that the rotation is about an axis through the centroid of the water-line section.
I am going to establish a set of rectangular axes, origin O, with the \( x\)-axis to the right, the \( y\)-axis towards you, and the \( z\)-axis downwards. I’m going to call the depth of the centre H of buoyancy \( \overline{z}\). Now let’s carry out the rotation about O through an angle \( \theta\).
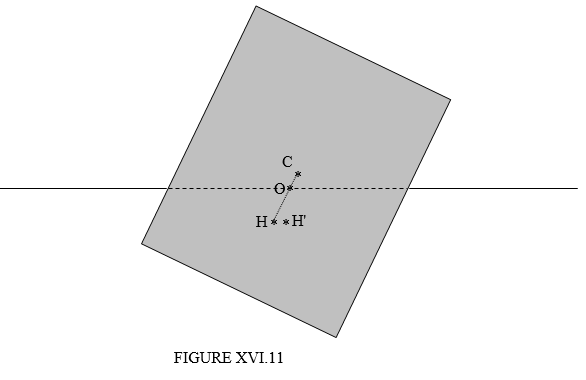
I have drawn the position of the new centre of buoyancy H' and I wish to find its coordinates \( (\overline{x}',\overline{z}')\) relative to O. We shall find that it has moved a little horizontally compared with the original position of H, but its depth is almost unchanged. Indeed, for small \( \theta\), we shall find that \( \overline{z}'-\overline{z}\) is of order \( \theta^{2}\), while \( \overline{x}'-\overline{x}\) is of order \( \theta\). Thus, to first order in \( \theta\), I shall assume that the depth of the centre of buoyancy has remained unchanged.
However, the coordinate \( \overline{x}'\) of the new centre of buoyancy will be of interest for the following reason. The weight of the body acts at its centre of mass C while the hydrostatic upthrust acts at the new centre of buoyancy H' and these two forces form a couple and exert a torque. You will understand from figure XVI.11 that if H' is to the left of C, the torque will topple the body over, whereas if H' is to the right of C, the torque will stabilize the body. Indeed, the horizontal distance between C and H' is known as the righting lever. The point on the line COH vertically above H' is called the metacentre. I haven’t drawn it on the diagram, in order to minimise clutter, but I shall use the symbol M to indicate the metacentre. We can see that the condition for stability of equilibrium is that HM > HC. This is why we are interested in finding the exact position of the new centre of buoyancy H'.
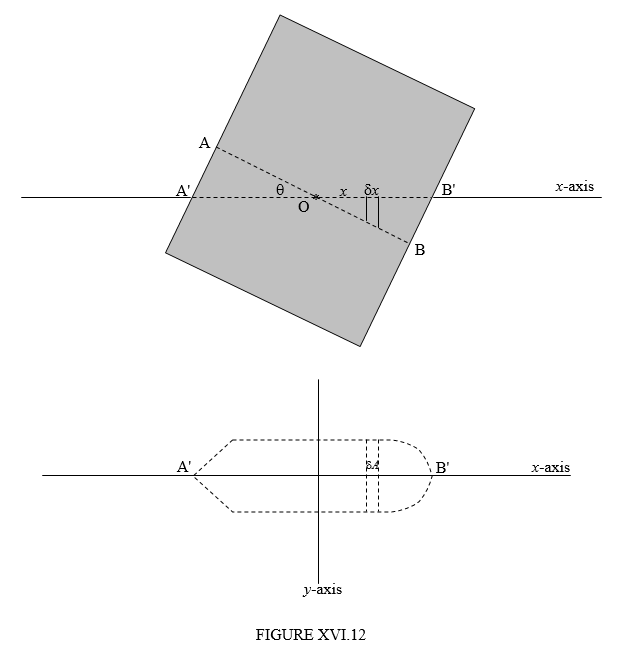
In the upper part of figure XVI.12 I have drawn the old and new water-line sections as seen from the side, and in the lower part I have drawn the new water-line section seen from above. I have indicated an elemental volume of width \( \delta x\) of the displaced fluid at a distance \( x\) from the centroid O of the water-line section. For small \( \theta\) the depth of this element is \( x\theta\). Let’s call its area in the water-line section \( \delta A\), so that the volume element is \( x\theta\delta A\). We’ll call the total volume of the displaced fluid (which is unaltered by the rotation) \( V\).
Consider the moments of volume about the \( x\)-axis. We have
\( V\overline{z}'=V\overline{z}\ -\ \int_{O}^{A'}\frac{1}{2}x\theta .x\theta\delta A\ +\ \int_{O}^{B'}\frac{1}{2}x\theta .x\theta\delta A\)
\[ V(\overline{x}'-\overline{x})=\theta\int_{A'}^{B'}x^{2}dA. \label{16.9.1} \]
Thus, as previously asserted, the vertical displacement of the centre of buoyancy is of order \( \theta^{2}\), and, to first order in \( \theta\) may be neglected.
Now consider the moments of volume about the \( y\)-axis. We have
\( V\overline{x}'=V\overline{x}\ -\ \int_{O}^{A'}x\theta\ dA\ x\ +\ \int_{O}^{A'}x\theta\ dA\ x\)
\[ V\ (\overline{x}'-\overline{x})\ =\ \theta\int_{A'}^{B'}x^{2}dA. \label{16.9.2} \]
But the integral on the right hand side of Equation \( \ref{16.9.2}\) is \( Ak^{2}\), where \( A\) is the area of the water-line section, and \( k\) is its radius of gyration.
Thus
\[ HH'=\frac{Ak^{2}\theta}{V}. \label{16.9.3} \]
Now \( HH'\ =\ HM\ \sin\ \theta\), where M is the metacentre, or, to first order in \( \theta\), HH' = HM % \( \theta\).
\[ \text{HM}\ =\ \frac{Ak^{2}}{V}. \label{16.9.4} \]
Therefore the condition for stability of equilibrium is that
\[ \frac{Ak^{2}}{V}>\text{HC}. \label{16.9.5} \]
Here, \( A\) and \( k^{2}\) refer to the water-line section, \( V\) is the volume submerged, and HC is the distance between centre of buoyancy and centre of mass.
Example. Suppose that the body is a cube of side \( 2a\) and of relative density \( s\). The water-line section is a square, and \( A=4a^{2}\) and \( k^{2}=\frac{a^{2}}{3}\). The volume submerged is \( 8a^{3}s\). The distance between the centres of mass and buoyancy is \( a(1-s)\), and so the condition for stability is
\[ \frac{a}{6s}>a(1-s) \label{16.9.6} \]
The equilibrium is unstable if
\[ 6s^{2}\ -\ 6s \ +\ 1<0. \label{16.9.7} \]
That is, the equilibrium is unstable if \( s\) is between \( 0.2113\) and \( 0.7887\). The cube will float vertically only if the density is less than \( 0.2113\) or if it is greater than \( 0.7887\).
Here in British Columbia there is a large logging industry, and many logs float horizontally in the water. They gradually become waterlogged, and, when the density of a log is nearly as dense as the water, the vertical position become stable and the log tips to the vertical position, nearly all of it submerged, with only an inch or so above the surface. It then becomes a danger to boats. If the length of the log is \( 2l\) and its radius is \( a\), what is the least relative density for which the vertical position is stable?
- Answer
-
The condition for stability of equilibrium is that
\( \frac{Ak^{2}}{V}>\text{HC}\)
Here, \( A\) and \( k^{2}\) refer to the water-line section, \( V\) is the volume submerged, and HC is the distance between centre of mass and centre of buoyancy.
In the present case we have a log of radius \( a\) and length \( 2l\). In this case
\( A=\pi a^{2},\quad k^{2}=\frac{1}{2}a^{2},\quad V=2\pi a^{2}l\).
\( \frac{Ak^{2}}{V}=\frac{a^{2}}{4l}\)
Density of log = \( \rho\)
Density of water = \( \rho_{0}\)
Relative density \( s=\frac{\rho}{\rho_{0}}\)
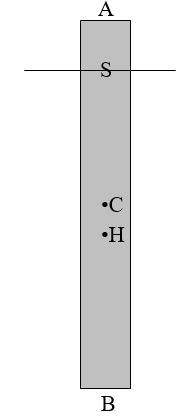
Some distances:
AB = \( 2l\)
AC = \( l\)
SB = \( 2ls\)
AS = \( 2l(1-s)\)
SH = \( ls\)
SC = AC - AS = \( 2ls-l\)2ls-l\)
HC = SH - SC = \( l(1-s)\)
The condition for stability is that \( \frac{a^{2}}{4l}>l(1-s)\)
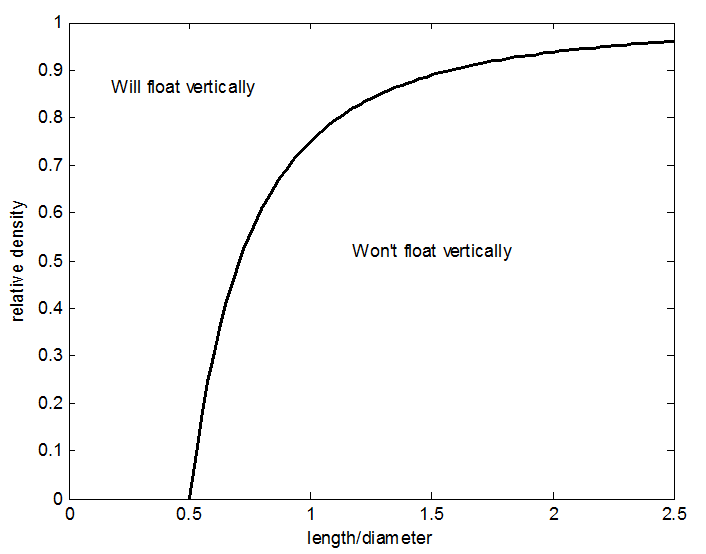
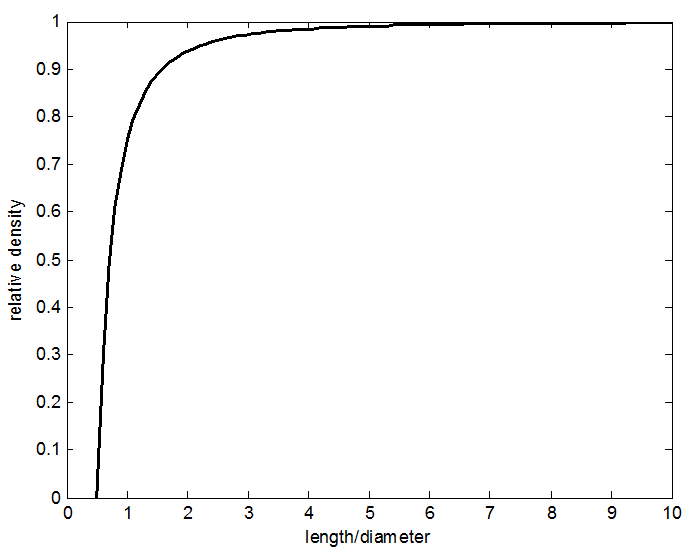
That is: \( s>1\ -\frac{1}{4}\left(\frac{\text{diameter}}{\text{length}}\right)^{2}\).
length/diameter = 0.5 0.71 1 2 10 40 relative density > 0 0.50 0.75 0.9375 0.9975 0.9988 A flat log, whose length is less than half its diameter, floats with its axis vertical, whatever its density (provided, of course, that it is less than that of water, when it will sink). If its length is equal to its diameter, it will float vertically provided that its density is at least 0.75 that of water. A very long log floats horizontally until it is almost completely saturated with water, and then it will tip over to a vertical position, almost completely submerged, when it is not readily visible and it is then a danger to boats. The condition for vertically-floating stable equilibrium is illustrated in the two graphs below.
Callstack:
at (Bookshelves/Classical_Mechanics/Classical_Mechanics_(Tatum)/16:_Hydrostatics/16.09:_Floating_Bodies), /content/body/pre, line 1, column 48