
28A: Oscillations: The Simple Pendulum, Energy in Simple Harmonic Motion
- Page ID
- 4117

Starting with the pendulum bob at its highest position on one side, the period of oscillations is the time it takes for the bob to swing all the way to its highest position on the other side and back again. Don’t forget that part about “and back again.”
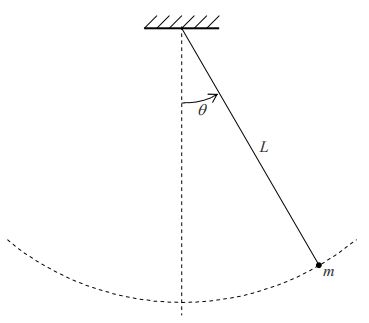
By definition, a simple pendulum consists of a particle of mass m suspended by a massless unstretchable string of length L in a region of space in which there is a uniform constant gravitational field, e.g. near the surface of the earth. The suspended particle is called the pendulum bob. Here we discuss the motion of the bob. While the results to be revealed here are most precise for the case of a point particle, they are good as long as the length of the pendulum (from the fixed top end of the string to the center of mass of the bob) is large compared to a characteristic dimension (such as the diameter if the bob is a sphere or the edge length if it is a cube) of the bob. (Using a pendulum bob whose diameter is 10% of the length of the pendulum (as opposed to a point particle) introduces a 0.05% error. You have to make the diameter of the bob 45% of the pendulum length to get the error up to 1%.)
If you pull the pendulum bob to one side and release it, you find that it swings back and forth. It oscillates. At this point, you don’t know whether or not the bob undergoes simple harmonic motion, but you certainly know that it oscillates. To find out if it undergoes simple harmonic motion, all we have to do is to determine whether its acceleration is a negative constant times its position. Because the bob moves on an arc rather than a line, it is easier to analyze the motion using angular variables.
The bob moves on the lower part of a vertical circle that is centered at the fixed upper end of the string. We’ll position ourselves such that we are viewing the circle, face on, and adopt a coordinate system, based on our point of view, which has the reference direction straight downward, and for which positive angles are measured counterclockwise from the reference direction. Referring to the diagram above, we now draw a pseudo free-body diagram (the kind we use when dealing with torque) for the string-plus-bob system.
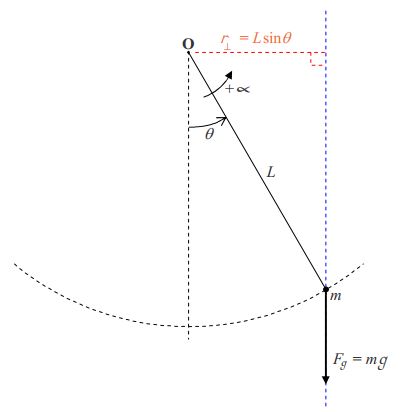
We consider the counterclockwise direction to be the positive direction for all the rotational motion variables. Applying Newton’s 2nd Law for Rotational Motion, yields:
\[\propto_{\circ\circlearrowleft}\space= \frac{\sum \tau_{\circ\circlearrowleft}}{I} \nonumber \]
\[\propto=\frac{-mgL\space \theta}{I} \nonumber \]
Next we implement the small angle approximation. Doing so means our result is approximate and that the smaller the maximum angle achieved during the oscillations, the better the approximation. According to the small angle approximation, with it understood that \(\theta\) must be in radians, \(\sin\theta\approx\theta\). Substituting this into our expression for \(\propto\), we obtain:
\[ \propto=-\frac{mgL\theta}{I} \nonumber \]
Here comes the part where we treat the bob as a point particle. The moment of inertia of a point particle, with respect to an axis that is a distance \(L\) away, is given by \(I=mL^2\). Substituting this into our expression for \(\propto\) we arrive at:
\[\propto=-\frac{-mgL}{mL^2} \theta \nonumber \]
Something profound occurs in our simplification of this equation. The masses cancel out. The mass that determines the driving force behind the motion of the pendulum (the gravitational force \(F_g=mg\) ) in the numerator, is exactly canceled by the inertial mass of the bob in the denominator. The motion of the bob does not depend on the mass of the bob! Simplifying the expression for \(\propto\) yields:
\[\propto=-\frac{g}{L}\theta \nonumber \]
Recalling that \(\propto\equiv\frac{d^2\theta}{dt^2}\), we have:
\[ \frac{d^2\theta}{dt^2}=-\frac{g}{L} \nonumber \]
Hey, this is the simple harmonic motion equation, which, in generic form, appears as \(\frac{d^2x}{dt^2}=-| constant | x\) (equation \(\ref{27-14}\) ) in which the \(| constant |\) can be equated to \((2\pi f)^2\) where \(f\) is the frequency of oscillations. The position variable in our equation may not be \(x\), but we still have the second derivative of the position variable being equal to the negative of a constant times the position variable itself. That being the case, number 1: we do have simple harmonic motion, and number 2: the constant \(\frac{g}{L}\) must be equal to \((2\pi f)^2\).
\[\frac{g}{L}=\space (2\pi f)^2 \nonumber \]
Solving this for \(f\), we find that the frequency of oscillations of a simple pendulum is given by
\[f=\frac{1}{2\pi}\space \sqrt{\frac{g}{L}}\label{28-1} \]
Again we call your attention to the fact that the frequency does not depend on the mass of the bob!
\(T=\frac{1}{f}\) as in the case of the block on a spring. This relation between \(T\) and \(f\) is a definition that applies to any oscillatory motion (even if the motion is not simple harmonic motion).
All the other formulas for the simple pendulum can be transcribed from the results for the block on a spring by writing
\(\theta\) in place of x,
\(\omega\) in place of v, and
\(\propto\) in place of \(a\).
Thus,
\[\theta=\theta_{max}\space cos(2\pi f\space t)\label{28-2} \]
\[\omega=-\omega_{max}\space sin(2\pi f\space t)\label{28-3} \]
\[\propto=-\propto_{max}\space cos (2\pi f\space t)\label{28-4} \]
\[\omega_{max}=(2\pi f)\theta_{max}\label{28-5} \]
\[\propto_{max}=(2\pi f)^2 \theta_{max}\label{28-6} \]
Energy Considerations in Simple Harmonic Motion
Let’s return our attention to the block on a spring. A person pulls the block out away from the wall a distance \(x_{max}\) from the equilibrium position, and releases the block from rest. At that instant, before the block picks up any speed at all, (but when the person is no longer affecting the motion of the block) the block has a certain amount of energy \(E\). And since we are dealing with an ideal system (no friction, no air resistance) the system has that same amount of energy from then on. In general, while the block is oscillating, the energy
\[E=K+U \nonumber\label{28-7} \]
is partly kinetic energy \(K=\frac{1}{2} mv^2\) and partly spring potential energy \(U=\frac{1}{2} kx^2\). The amount of each varies, but the total remains the same. At time 0, the \(K\) in \(E=K+U\) is zero since the velocity of the block is zero. So, at time 0:
\[E=U \nonumber \]
\[E=\frac{1}{2} k \, x^2_{\max} \nonumber \]
An endpoint in the motion of the block is a particularly easy position at which to calculate the total energy since all of it is potential energy.
As the spring contracts, pulling the block toward the wall, the speed of the block increases so, the kinetic energy increases while the potential energy \(U=\frac{1}{2} kx^2\) decreases because the spring becomes less and less stretched. On its way toward the equilibrium position, the system has both kinetic and potential energy
\[E=K+U \nonumber \]
with the kinetic energy \(K\) increasing and the potential energy \(U\) decreasing. Eventually the block reaches the equilibrium position. For an instant, the spring is neither stretched nor compressed and hence it has no potential energy stored in it. All the energy (the same total that we started with) is in the form of kinetic energy, \(K=\frac{1}{2}mV^2\).
\[E=K+0 \nonumber \]
\[E=K \nonumber \]
The block keeps on moving. It overshoots the equilibrium position and starts compressing the spring. As it compresses the spring, it slows down. Kinetic energy is being converted into spring potential energy. As the block continues to move toward the wall, the ever-the-same value of total energy represents a combination of kinetic energy and potential energy with the kinetic energy decreasing and the potential energy increasing. Eventually, at its closest point of approach to the wall, its maximum displacement in the \(–x\) direction from its equilibrium position, at its turning point, the block, just for an instant has a velocity of zero. At that instant, the kinetic energy is zero and the potential energy is at its maximum value:
\[E=0+U \nonumber \]
\[E=U \nonumber \]
Then the block starts moving out away from the wall. Its kinetic energy increases as its potential energy decreases until it again arrives at the equilibrium position. At that point, by definition, the spring is neither stretched nor compressed so the potential energy is zero. All the energy is in the form of kinetic energy. Because of its inertia, the block continues past the equilibrium position, stretching the spring and slowing down as the kinetic energy decreases while, at the same rate, the potential energy increases. Eventually, the block is at its starting point, again just for an instant, at rest, with no kinetic energy. The total energy is the same total as it has been throughout the oscillatory motion. At that instant, the total energy is all in the form of potential energy. The conversion of energy, back and forth between the kinetic energy of the block and the potential energy stored in the spring, repeats itself over and over again as long as the block continues to oscillate (with—and this is indeed an idealization—no loss of mechanical energy).
A similar description, in terms of energy, can be given for the motion of an ideal (no air resistance, completely unstretchable string) simple pendulum. The potential energy, in the case of the simple pendulum, is in the form of gravitational potential energy \(U =mgy\) rather than spring potential energy. The one value of total energy that the pendulum has throughout its oscillations is all potential energy at the endpoints of the oscillations, all kinetic energy at the midpoint, and a mix of potential and kinetic energy at locations in between.