
5.4: Simple Machines
- Page ID
- 101163

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Identify the six simple machines.
- Understand how a simple machine can change the application of force based on the principle of conservation of energy
Long before the concept of energy was understood, the principles of conservation of energy were being used to develop simple machines. There is no documentation of the first machine ever used by humans or our ancestors, but it was probably a found object used in prehistoric times: perhaps a rock or stick used to pry open something to get at a source of food. What we refer to as the six classical simple machines were defined during the Renaissance period. They are the lever, the wheel and axle, the pulley, the inclined plane, the wedge, and the screw.
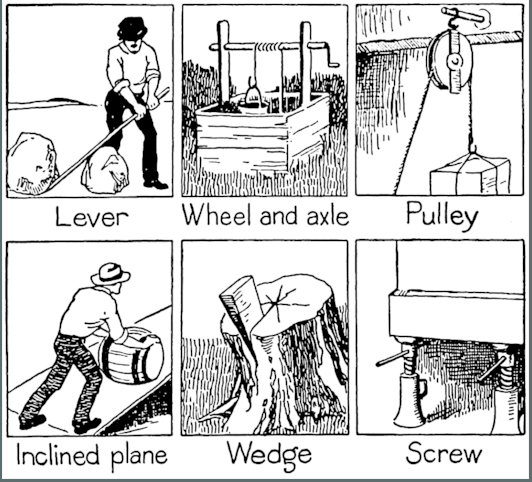
By Foster, Ellsworth D., ed; Hughes, James L. (James Laughlin) - The American educator; completely remodelled and rewritten from original text of the New practical reference library, with new plans and additional material (1919), Vol. 5, pg. 2290., Public Domain, [commons.wikimedia.org]
All of the simple machines function on the principle of conservation of energy, related to the work-energy theorem we discussed previously in this chapter. When considering simple machines, we typically ignore energy lost to friction even though we know that it exists. When we do that we can consider the relationship between the output of the machine and the applied force. The ratio of output to applied force is sometimes called the mechanical advantage. For example, a roadside service technician might use a hand or foot operated jack to push the body of a car up in order to change the tire. At no point in this process does the roadside technician apply a force with their own body capable of lifting the mass of a car in Earth's gravity. But the total energy the roadside technician puts into the machine is approximately equal to the total energy the machine expends to lift the car. The jack is an example of the lever, one of the six simple machines.
The relationship between the input and output of the machine is illustrated by the following equation:
\[W_{\text {in}}=W_{\text {out}} \nonumber \].
Work is conserved because energy is conserved.
The energy that is conserved in simple machines relates to the force that enters and leaves the machine. As such, we can rewrite this equation to show it in terms of force and distance:
\[(Fd)_{\text {in}}=(Fd)_{\text {out}} \nonumber \]
If the force that leaves the machine is greater than the force that enters the machine (as in our earlier example of the hand operated jack), then the distance over which that force operates must be proportionally smaller. For the hand operated jack, the distance the operator of the jack moves their hand in order to operate it is much greater than the distance through which the jack moves against the force of gravity on the car. We can say that the machine is multiplying the force output. It does this by increasing the distance over which the input force operates.
Suppose a technician using a hand operated jack needs to lift one end of a car by a quarter of a meter. In order to do so, they must move a hand operated lever 200 times through a distance of 0.10 meters each time. What is the average force they are depressing the lever with over those 200 times in order to lift the car? Assume the average mass of the portion of the car being lifted is 700 kg.
Solution
This is an example of using the formulation of conservation of mechanical energy for simple machines that we introduced in this section:
\[(Fd)_{\text {in}}=(Fd)_{\text {out}} \nonumber \]
We can start by listing known values and determining other values which are part of this equation from the given information.
\[(d)_{\text {out}}=0.25\mathrm{~m} \nonumber \]
Because the lever has to be moved 200 times, we get the total distance by multiplying this by the length of the lever:
\[(d)_{\text {in}}=200(0.10\mathrm{~m})= 20\mathrm{~m}\nonumber \]
We can assume that lifting this car is going to involve working against the Earth's gravity, so we find that force as follows:
\[(F)_{\text {out}}=(700\mathrm{~kg})(10 \cdot \mathrm{m}^{2} / \mathrm{s}^{2} )= 7000\mathrm{~N}\nonumber \]
We can then solve for the force being added using some algebra.
\[(F)_{\text {in}}=\frac{(Fd)_{\text {out}}}{(d)_{\text {in}}} \nonumber \]
And then if we put in the numbers we have already calculated we get:
\[(F)_{\text {in}}=\frac{(7000 \mathrm{~N})(0.25 \mathrm{~m}) }{(20 \mathrm{~m})}=87.5 \mathrm{~N} \nonumber \]
This is considerably less than the 7000 N the half car is exerting on the Earth due to the gravitational force.
Another way in which machines alter the force is through changing the direction of the force. Work and energy are scalar functions, but force is still a vector. The direction of the vector might be much different due to the interaction with the simple machine. Simple machines might change the direction of the force without changing its magnitude. But many times they do both.
Section Summary
- There are six simple machines, many of which have been used since before recorded history.
- Simple machines function based on the conservation of energy.
- The direction and/or magnitude of a force might be changed by a simple machine.