
11.1: Simple Harmonic Motion
- Page ID
- 6995

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)I am assuming that this is by no means the first occasion on which the reader has met simple harmonic motion, and hence in this section I merely summarize the familiar formulas without spending time on numerous elementary examples
Simple harmonic motion can be defined as follows: It a point P moves in a circle of radius \( a\) at constant angular speed \( \omega\) (and hence period \( \frac{2\pi}{\omega}\)) its projection Q on a diameter moves with simple harmonic motion. This is illustrated in Figure XI.1, in which the velocity and acceleration of P and of Q are shown as coloured arrows. The velocity of P is just \( a\omega\) and its acceleration is the centripetal acceleration \( a\omega^{2}\). As in Chapter 8 and elsewhere, I use blue arrows for velocity vectors and green for acceleration.
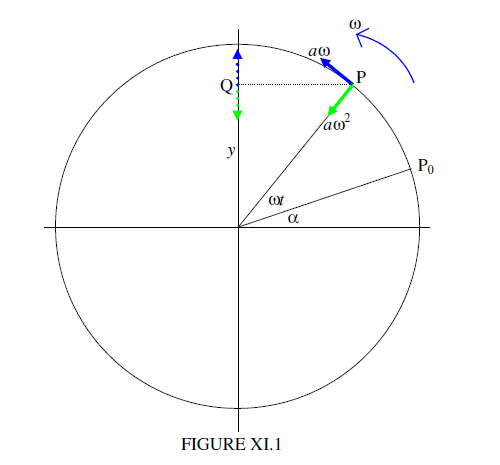
\( P_{0}\) is the initial position of P - i.e. the position of P at time \( t=0\) - and a is the initial phase angle. At time \( t\) later, the phase angle is \( \omega t+\alpha\). The projection of P upon a diameter is Q. The displacement of Q from the origin, and its velocity and acceleration, are
\[ y=a\sin(\omega t +\alpha) \label{11.1.1} \]
\[ v=\dot{y}=a\omega\cos(\omega t +\alpha) \label{11.1.2} \]
\[ \ddot{y}=-a\omega^{2}\sin(\omega t +\alpha). \label{11.1.3} \]
Equations \(\ref{11.1.2}\) and \( \ref{11.1.3}\) can be obtained immediately either by inspection of Figure XI.1 or by differentiation of Equation \( \ref{11.1.1}\). Elimination of the time from Equations \( \ref{11.1.1}\) and \( \ref{11.1.2}\) and from Equations \( \ref{11.1.1}\) and \( \ref{11.1.3}\) leads to
\[ v=\dot{y}=\omega(a^{2}-y^{2})^{\frac{1}{2}} \label{11.1.4} \]
and
\[ \ddot{y}=-\omega^{2}y \label{11.1.5} \]
An alternative definition of simple harmonic motion is to define as simple harmonic motion any motion that obeys the differential Equation \( \ref{11.1.5}\). We then have the problem of solving this differential Equation. We can make no progress with this unless we remember to write \( \ddot{y}\) as \( v\frac{dv}{dy}\) (recall that we did this often in Chapter 6.) Equation \( \ref{11.1.5}\) then immediately integrates to
\[ v^{2}=\omega^{2}(a^{2}-y^{2}) \nonumber \]
A further integration, with \( v=\frac{dy}{dt}\), leads to
\[ y = a \sin (\omega t + \alpha) \nonumber \]
provided we remember to use the appropriate initial conditions. Differentiation with respect to time then leads to Equation \( \ref{11.1.2}\), and all the other Equations follow.
Important Problem.
Show that \( y=a\sin(\omega t + \alpha)\) can be written
\[ y = A \sin \omega t + B \cos \omega t \label{11.1.8} \]
where \( A=a\cos\alpha\) and \( B=a\sin\alpha\). The converse of these are \( a=\sqrt{A^{2}+B^{2}}, \cos\alpha=\frac{A}{\sqrt{A^{2}+B^{2}}}, \sin\alpha=\frac{B}{\sqrt{A^{2}+B^{2}}}\). It is important to note that, if \( A\) and \( B\) are known, in order to calculate a without ambiguity of quadrant it is entirely necessary to calculate both \( \cos\alpha\) and \( \sin\alpha\). It will not do, for example, to calculate \( \alpha\) solely from \( \alpha=\tan^{-1}(\frac{y}{x})\) because this will give two possible solutions for a differing by 180o.
Show also that Equation \(\ref{11.1.8}\) can also be written
\[ y=Me^{i\omega t}+Ne^{-i\omega t}, \label{11.1.9} \]
where \( M=\frac{1}{2}(B-iA)\) and \( N=\frac{1}{2}(B+iA)\) show that the right hand side of Equation \( \ref{11.1.9}\) is real.
The four large satellites of Jupiter furnish a beautiful demonstration of simple harmonic motion. Earth is almost in the plane of their orbits, so we see the motion of satellites projected on a diameter. They move to and fro in simple harmonic motion, each with different amplitude (radius of the orbit), period (and hence angular speed \( \omega\) ) and initial phase angle \( \alpha\).