
4.2: Angular Velocity and Eulerian Angles
- Page ID
- 6947

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Let \( Oxyz\) be a set of space-fixed axis, and let \( Ox_{0}y_{0}z_{0}\) be the body-fixed principal axes of a rigid body.
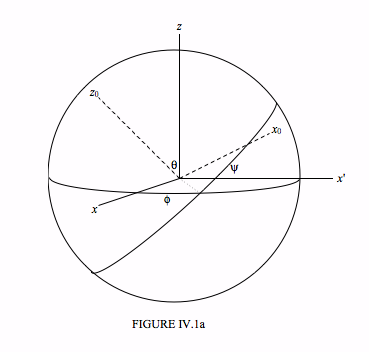
The orientation of the body-fixed principal axes \( Ox_{0}y_{0}z_{0}\) with respect to the space-fixed axes \( Oxyz\) can be described by the three Euler angles: \( \theta\), \(\phi\), and \(\psi\). These are illustrated in Figure IV.1a. Those who are not familiar with Euler angles or who would like a reminder can refer to their detailed description in Chapter 3 of my notes on Celestial Mechanics.
We are going to examine the motion of a body that is rotating about a non-principal axis. If the body is freely rotating in space with no external torques acting upon it, its angular momentum \( \bf{L}\) will be constant in magnitude and direction. The angular velocity vector \( \bf{\omega} \), however, will not be constant, but will wander with respect to both the space-fixed and body-fixed axes, and we shall be examining this motion. I am going to call the instantaneous components of \(\omega \) relative to the body-fixed axes \( \omega_{1} , \omega_{2}, \omega_{3} \), and its magnitude \(\omega\). As the body tumbles over and over, its Euler angles will be changing continuously. We are going to establish a geometrical relation between the instantaneous rates of change of the Euler angles and the instantaneous components of \( \omega\). That is, we are going to find how \( \omega_{1} , \omega_{2}\) and \( \omega_{3}\) are related to \( \dot{\theta} , \dot{\phi} \) and \( \dot{\psi}\).
I have indicated, in Figure VI.2a, the angular velocities \( \boldsymbol{\dot{\theta}} , \boldsymbol{\dot{\phi}} \) and \( \boldsymbol{\dot{\psi}}\) as vectors in what I hope will be agreed are the appropriate directions.
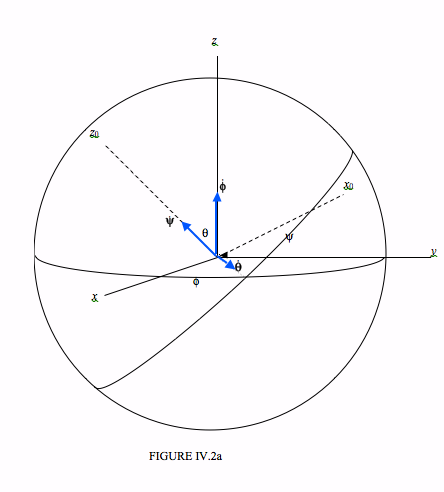
It should be clear that \(\omega_1\) is equal to the \( x_{0}\)-component of \( \boldsymbol{\dot{\phi}}\) plus the \( x_{0}\)-component of \( \boldsymbol{\dot{\theta}}\) and that \(\omega_2\) is equal to the \( y_{0}\)-component of \( \boldsymbol{\dot{\phi}}\) plus the \( y_{0}\)-component of \( \boldsymbol{\dot{\theta}}\) and that \(\omega_3\) is equal to the \( z_{0}\)-component of \( \boldsymbol{\dot{\phi}}\) plus \( \boldsymbol{\dot{\psi}}\)
Let us look at Figure IV.2b
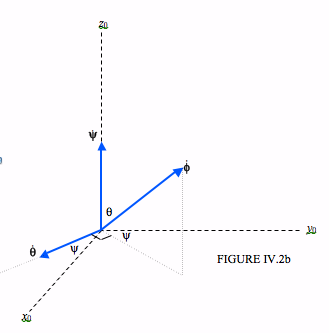
We see that the \( x_{0}\) and \( y_{0}\) components of \( \boldsymbol{\dot{\theta}}\) are \( \dot{\theta} \cos \psi \) and \( - \dot{\theta} \sin \psi \) respectively. The \( x_{0}\), \( y_{0}\) and \( z_{0}\) components of \( \boldsymbol{\dot{\phi}}\) are, respectively:
- \( \dot{\phi} \sin \theta \sin \psi\),
- \( \dot{\phi} \sin \theta \sin \psi\), and
- \( \dot{\phi} \cos \theta\).
Hence we arrive at
\[ \omega_{1} = \dot{\phi} \sin \theta \sin \psi + \dot{\theta} \cos \psi . \tag{4.2.1}\label{eq:4.2.1} \]
\[ \omega_{2} = \dot{\phi} \sin \theta \cos \psi - \dot{\theta} \sin \psi . \tag{4.2.2}\label{eq:4.2.2} \]
\[ \omega_{3} = \dot{\phi} \cos \theta + \dot{ \psi} \tag{4.2.3}\label{eq:4.2.3} \]