
9.3: Virtual Work
- Page ID
- 6984

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)We have seen that a mechanical system subject to conservative forces is in equilibrium when the derivatives of the potential energy with respect to the coordinates are zero. A method of solving such problems, therefore, is to write down an expression for the potential energy and put the derivatives equal to zero.
A very similar method is to use the principle of virtual work. In this method, we imagine that we act upon the system in such a manner as to increase one of the coordinates. We imagine, for example, what would happen if we were to stretch one of the springs, or to increase the angle between two jointed rods, or the angle that the ladder makes as it leans against the wall. We ask ourselves how much work we have to do on the system in order to increase this coordinate by a small amount. If the system starts from equilibrium, this work will be very small, and, in the limit of an infinitesimally small displacement, this “virtual work” will be zero. This method is very little different from setting the derivative of the potential energy to zero. I mention it here, however, because the concept might be useful in Chapter 13 in describing Hamilton’s variational principle.
Let’s start by doing a simple ladder problem by the method of virtual work. The usual uniform ladder of high school physics, of length \( 2l\) and weight \( mg\), is leaning in limiting static equilibrium against the usual smooth vertical wall and the rough horizontal floor whose coefficient of limiting static friction is \( \mu\). What is the angle \(\theta \) that the ladder makes with the vertical wall?
I have drawn the four forces on the ladder, namely: its weight \( mg\); the normal reaction of the floor on the ladder, which must also be \( mg\); the frictional force, which is \( \mu mg\); and the normal (and only) reaction of the wall on the ladder, which must also be \( \mu mg\).
There are several ways of doing this, which will be familiar to many readers. The only small reminder that I will give is to point out that, if you wish to combine the two forces at the foot of the ladder into a single force acting upwards and somewhat to the left, so that there are then just three forces acting on the ladder, the three forces must act through a single point, which will be above the middle of the ladder and to the right of the point of contact with the wall. But we are interested now in solving this problem by the principle of virtual work.
Before starting, I should warn that it is important in using the principle of virtual work to be meticulously careful about signs, and in that respect I remind readers that in the differential calculus the symbols \( \delta\) and \( d\) in front of a scalar quantity \( x\) do not mean “a small change in” or “an infinitesimal change” in \( x\). Such language is vague. The symbols stand for “a small increase in” and “an infinitesimal increase in”.
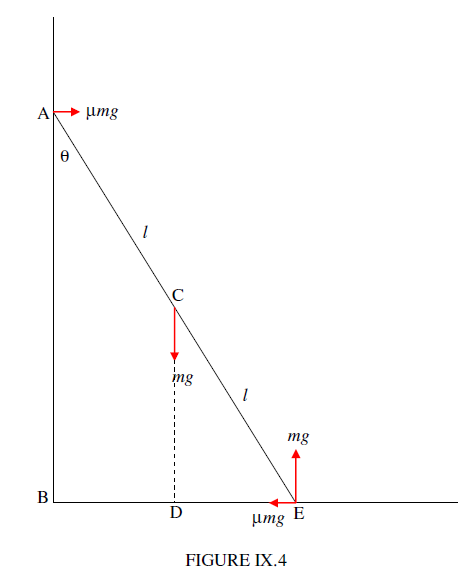
Let us take note of the following distances:
\[ CD = l \cos \theta \nonumber \]
and
\[ BE = 2l \sin \theta. \nonumber \]
If we were to increase \( \theta\) by \( \delta\theta\), keeping the ladder in contact with wall and floor, the increases in these distances would be
\[ \delta(CD)=-l\sin\theta d\theta. \nonumber \]
and
\[ \delta(BE)=2l\cos\theta d\theta. \nonumber \]
Further, if were to increase \( \theta\) by \( \delta\theta\), the work done by the force at C would be \( mg\) times the decrease of the distance CD, and the work done by the frictional force at E would be minus \( \mu mg\) times the increase of the distance BE. The other two forces do no work. Thus the “virtual work” done by the external forces on the ladder is
\[ mg. l\sin\theta\delta\theta-\mu mg.2l \cos\theta\delta\theta. \nonumber \]
On putting the expression for the virtual work to zero, we obtain
\[ \tan\theta=2\mu. \nonumber \]
You should verify that this is the same answer as you get from other methods – the easiest of which is probably to take moments about E.
There is something about virtual work which reminds me of thermodynamics. The first law of thermodynamics, for example is \( \Delta U=\Delta q+\Delta w\), where \( \Delta U\) is the increase of the internal energy of the system, \( \Delta q\) is the heat added to the system, and \( \Delta w\) is the work done on the system. Prepositions play an important part in thermodynamics. It is always mandatory to state clearly and without ambiguity whether work is done by the piston on the gas, or by the gas on the system; or whether heat is gained by the system or lost from it. Without these prepositions, all discussion is meaningless. Likewise in solving a problem by the principle of virtual work, it is always essential to say whether you are describing the work done by a force on what part of the system (on the ladder or on the floor?) and whether you are describing an increase or a decrease of some length or angle.
Let us move now to a slightly more difficult problem, which we’ll try by three different methods – including that of virtual work.
In Figure IX.5, a uniform rod AB of weight \( Mg\) and length \( 2a\) is freely hinged at A. The end B carries a smooth ring of negligible mass. A light inextensible string of length \( l\) has one end attached to a fixed point C at the same level as A and distant \( 2a\) from it. It passes through the ring and carries at its other end a weight \( \frac{1}{10}Mg\) hanging freely. (The “smooth” ring means that the tension in the string is the same on both sides of the ring.) Find the angle CAB when the system is in equilibrium.
I have marked in various angles and lengths, which can easily be determined from the geometry of the system, and I have also marked the four forces on the rod.
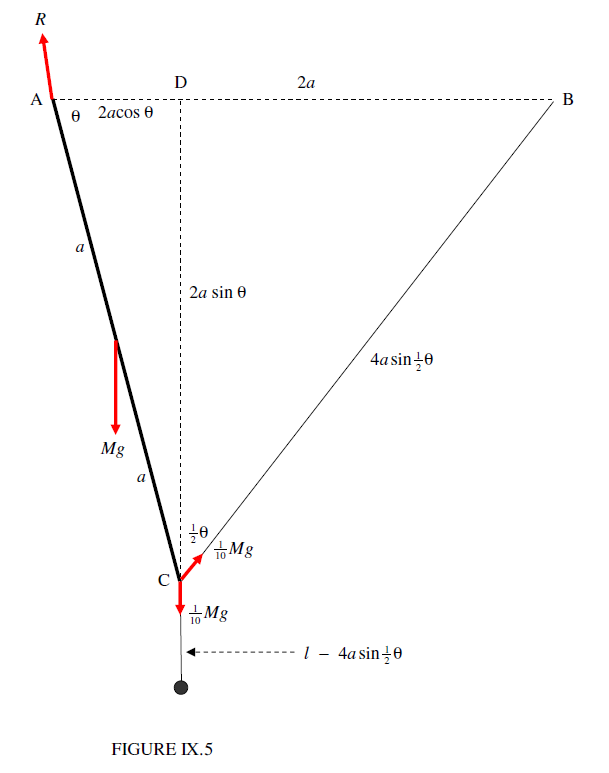
Let us first try a very conventional method. We know rather little about the force R of the hinge on the rod (though see below), and therefore this is a good reason for taking moments about the point A. We immediately obtain
\[ Mga\cos\theta+\frac{1}{10}Mg.2a\cos\theta=\frac{1}{10}Mg.2a\cos\frac{1}{2}\theta. \nonumber \]
Divide by \( Mga\) and set \( \cos\theta=2c^{2}-1\), where \( c=\cos\frac{1}{2}\theta\). After a little algebra, we obtain \( 12c^{2}-c-6=0\) and hence we find for the equilibrium condition that \( \theta\) = 82o 49' or 263o 37'. The latter, by the way, is a physically valid solution – you might want to sketch it.
Now let’s try the same problem using energy conditions. We’ll take the zero of potential energy when the rod is horizontal – at which time the small mass is at a distance l below the level AC.
When the angle CAB = \( \theta\), the distance of the centre of mass of the rod below AC is \( a\sin\theta\) and the distance of the small mass below AC is \( l-4a\sin\frac{1}{2}\theta+2a\sin\theta\) so that the potential energy is
\[ V=-Mga\sin\theta+\frac{1}{10}Mg[l-(l-4a\sin\frac{1}{2}\theta+2a\sin\theta)]=-\frac{2}{3}Mga(3\sin\theta-\sin\frac{1}{2}\theta) \nonumber \]
The derivative is
\[ \frac{dV}{d\theta}=-\frac{2}{3}Mga(3\cos\theta-\frac{1}{2}cos\frac{1}{2}\theta), \nonumber \]
and setting this to zero will produce the same results as before. Further differentiation (do it), or a graph of \( V\) : \( \theta\) (do it), will show that the 82o 49' solution is stable and the 263o 37' solution is unstable.
Now let’s try it by virtual work. We are going to increase \( \theta\) by \( \delta\theta\) and see how much work is done.
The distance of the centre of mass of the rod below AC is \( a\sin\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( a\cos\theta \delta\theta\), and the work done by \( Mg\) will be \( Mga \cos \theta \delta\theta\).
The distance of the ring below AC is \( 2a\sin\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( 2a\cos\theta\delta\theta\), and the work done by the downward force will be \( \frac{1}{10}Mg.2a\cos\theta \delta\theta\).
The distance BC is \( 4a\sin\frac{1}{2}\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( 2a\cos\frac{1}{2}\theta\delta\theta\) and the work done by the sloping force will be MINUS \( \frac{1}{10}Mg.2a\cos\frac{1}{2}\theta\delta\theta\).
Thus the virtual work is
\[ Mg.a\cos\theta\delta\theta+\frac{1}{10}Mg.2a\cos\theta\delta\theta-\frac{1}{10}Mg.2a\cos\frac{1}{2}\theta\delta\theta. \nonumber \]
If we put this equal to zero, we obtain the same result as before.