
5.5: Functions with Several Independent Variables




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Functions with several independent variables yi(x)
The discussion has focussed on systems having only a single function y(x) such that the functional is an extremum. It is more common to have a functional that is dependent upon several independent variables f[y1(x),y′1(x),y2(x),y′2(x),....;x] which can be written as
F=∫x2x1N∑i=1f[yi(x),y′i(x);x]dx
where i=1,2,3,....,N.
By analogy with the one dimensional problem, define neighboring functions ηi for each variable. Then
yi(ϵ,x)=yi(0,x)+ϵηi(x)y′i(ϵ,x)≡dyi(ϵ,x)dx=dyi(0,x)dx+ϵdηidx
where ηi are independent functions of x that vanish at x1 and x2. Using equations (5.2.10) and 5.5.2 leads to the requirements for an extremum value to be ∂F∂ϵ=∫x2x1N∑i(∂f∂yi∂yi∂ϵ+∂f∂y′i∂y′i∂ϵ)dx=∫x2x1N∑i(∂f∂yi−ddx∂f∂y′i)ηi(x)dx=0
If the variables yi(x) are independent, then the ηi(x) are independent. Since the ηi(x) are independent, then evaluating the above equation at ϵ=0 implies that each term in the bracket must vanish independently. That is, Euler’s differential equation becomes a set of N equations for the N independent variables
∂f∂yi−ddx∂f∂y′i=0
where i=1,2,3..N. Thus, each of the N equations can be solved independently when the N variables are independent. Euler’s equation involves partial derivatives for the dependent variables yi, y′i and the total derivative for the independent variable x.
Example 5.5.1: Fermat's Principle
In 1662 Fermat’s proposed that the propagation of light obeyed the generalized principle of least transit time. In optics, Fermat’s principle, or the principle of least time, is the principle that the path taken between two points by a ray of light is the path that can be traversed in the least time. Historically, the proof of Fermat’s principle by Johann Bernoulli was one of the first triumphs of the calculus of variations, and served as a guiding principle in the formulation of physical laws using variational calculus.
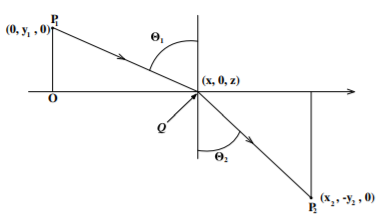
Consider the geometry shown in the figure, where the light travels from the point P1(0,y1,0) to the point P2(x2,−y2,0). The light beam intersects a plane glass interface at the point Q(x,0,z).
The French mathematician Fermat discovered that the required path travelled by light is the path for which the travel time t is a minimum. That is, the transit time from the initial point P1 to the final point P2 is given by
t=∫21dt=∫21dsv=1c∫21nds=1c∫21n(x,y,z)√1+(x′)2+(z′)2dy
assuming that the velocity of light in any medium is given by v=c/n where n is the refractive index of the medium and c is the velocity of light in vacuum.
This is a problem that has two dependent variables x(y) and z(y) with y chosen as the independent variable. The integral can be broken into two parts y1→0 and 0→−y2.
t=1c[∫0y1n1√1+(x′)2+(z′)2dy+∫−y20n2√1+(x′)2+(z′)2dy]
The functionals are functions of x′ and z′ but not x or z. Thus Euler’s equation for z simplifies to
0+ddy(1c(n1z′√1+x′2+z′2+n2z′√1+x′2+z′2))=0
This implies that z′=0, therefore z is a constant. Since the initial and final values were chosen to be z1=z2=0, therefore at the interface z=0. Similarly Euler’s equations for x are
0+ddy(1c(n1x′√1+x′2+z′2+n2x′√1+x′2+z′2))=0
But x′=tanθ1 for n1 and x′=−tanθ2 for n2 and it was shown that z′=0. Thus
0+ddy(1c(n1tanθ1√1+(tanθ1)2−n2tanθ2√1+(tanθ2)2))=ddy(1c(n1sinθ1−n2sinθ2))=0 Therefore 1c(n1sinθ1−n2sinθ2)= constant which must be zero since when n1=n2, then θ1=θ2. Thus Fermat’s principle leads to Snell’s Law. n1sinθ1=n2sinθ2
The geometry of this problem is simple enough to directly minimize the path rather than using Euler’s equations for the two parameters as performed above. The lengths of the paths P1Q and QP2 are
P1Q=√x2+y21+z2QP2=√(x2−x)2+y22+z2
The total transit time is given by
t=1c(n1√x2+y21+z2+n2√(x2−x)2+y22+z2)
This problem involves two dependent variables, y(x) and z(x). To find the minima, set the partial derivatives ∂t∂z=0 and ∂t∂x=0. That is,
∂t∂z=1c(n1z√x2+y21+z2+n2z√(x2−x)2+y22+z2)=0
This is zero only if z=0, that is the point Q lies in the plane containing P1 and P2. Similarly
∂t∂x=1c(n1x√x2+y21+z2−n2(x2−x)√(x2−x)2+y22+z2)=1c(n1sinθ1−n2sinθ2)=0
This is zero only if Snell’s law applies that is
n1sinθ1=n2sinθ2
Fermat’s principle has shown that the refracted light is given by Snell’s Law, and is in a plane normal to the surface. The laws of reflection also are given since then n1=n2=n and the angle of reflection equals the angle of incidence.
Example 5.5.2: Minimum of (∇ϕ)2 in a volume
Find the function ϕ(x1,x2,x3) that has the minimum value of (∇ϕ)2 per unit volume. For the volume V it is desired to minimize the following
J=1V∫∫∫(∇ϕ)2dx1dx2dx3=1V∫∫∫[(∂ϕ∂x1)2+(∂ϕ∂x2)2+(∂ϕ∂x3)2]dx1dx2dx3
Note that the variables x1,x2,x3 are independent, and thus Euler’s equation for several independent variables can be used. To minimize the functional J, the function
f=(∂ϕ∂x1)2+(∂ϕ∂x2)2+(∂ϕ∂x3)2
must satisfy the Euler equation
∂f∂ϕ−3∑i=1∂∂xi(∂f∂ϕ′)=0
where ϕ′=∂ϕ∂xi. Substitute f into Euler’s equation gives
3∑i=1∂∂xi(∂ϕ∂xi)=0
This is just Laplace’s equation
∇2ϕ=0
Therefore ϕ must satisfy Laplace’s equation in order that the functional J be a minimum.