
Epilogue
- Page ID
- 9677

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)This book has introduced powerful analytical methods in physics that are based on applications of variational principles to Hamilton’s Action Principle. These methods were pioneered in classical mechanics by Leibniz, Lagrange, Euler, Hamilton, and Jacobi, during the remarkable Age of Enlightenment, and reached full fruition at the start of the \(20^{th}\) century.
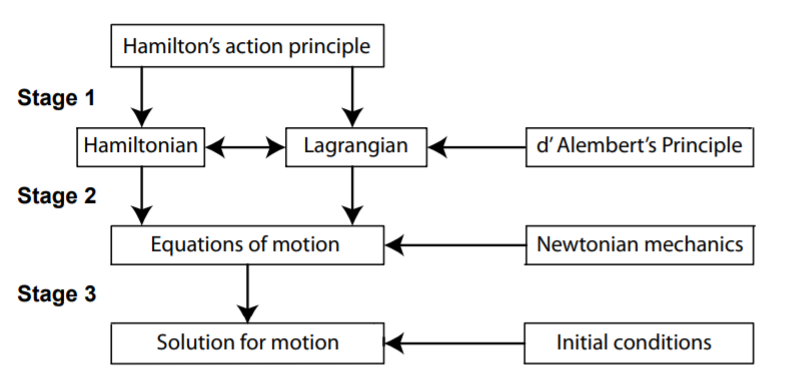
The philosophical roadmap, shown above, illustrates the hierarchy of philosophical approaches available when using Hamilton’s Action Principle to derive the equations of motion of a system. The primary \(\mathbf{Stage1}\) uses Hamilton’s Action functional, \(S = \int^{t_f}_{t_i} L(\mathbf{q},\mathbf{\dot{q}},t)dt\) to derive the Lagrangian, and Hamiltonian functionals. \(\mathbf{Stage1}\) provides the most fundamental and sophisticated level of understanding and involves specifying all the active degrees of freedom, as well as the interactions involved. \(\mathbf{Stage2}\) uses the Lagrangian or Hamiltonian functionals, derived at \(\mathbf{Stage1}\), in order to derive the equations of motion for the system of interest. \(\mathbf{Stage3}\) then uses the derived equations of motion to solve for the motion of the system, subject to a given set of initial boundary conditions.
Newton postulated equations of motion for nonrelativistic classical mechanics that are identical to those derived by applying variational principles to Hamilton’s Principle. However, Newton’s Laws of Motion are applicable only to nonrelativistic classical mechanics, and cannot exploit the advantages of using the more fundamental Hamilton’s Action Principle, Lagrangian, and Hamiltonian. Newtonian mechanics requires that all the active forces be included in the equations of motion, and involves dealing with vector quantities which is more difficult than using the scalar functionals, action, Lagrangian, or Hamiltonian. Lagrangian mechanics based on d’Alembert’s Principle does not exploit all the advantages provided by Hamilton’s Action Principle.
Considerable advantages result from deriving the equations of motion based on Hamilton’s Principle, rather than basing them on the Newton’s postulated Laws of Motion. It is significantly easier to use variational principles to handle the scalar functionals, action, Lagrangian, and Hamiltonian, rather than starting with Newton’s vector differential equations-of-motion. The three hierarchical stages of analytical mechanics facilitate accommodating extra degrees of freedom, symmetries, constraints, and other interactions. For example, the symmetries identified by Noether’s theorem are more easily recognized during the primary “action” and secondary “Hamiltonian/Lagrangian” stages, rather than at the subsequent “equations-of-motion” stage. Constraint forces, and approximations, introduced at the \(\mathbf{Stage1}\) or \(\mathbf{Stage2}\), are easier to implement than at the subsequent \(\mathbf{Stage3}\). The correspondence of Hamilton’s Action in classical and quantal mechanics, as well as relativistic invariance, are crucial advantages for using the analytical approach in relativistic mechanics, fluid motion, quantum, and field theory.
Philosophically, Newtonian mechanics is straightforward to understand since it uses vector differential equations of motion that relate the instantaneous forces to the instantaneous accelerations. Moreover, the concepts of momentum plus force are intuitive to visualize, and both cause and effect are embedded in Newtonian mechanics. Unfortunately, Newtonian mechanics is incompatible with quantum physics, it violates the relativistic concepts of space-time, and fails to provide the unified description of the gravitational force plus planetary motion as geodesic motion in a four-dimensional Riemannian structure.
The remarkable philosophical implications embedded in applying variational principles to Hamilton’s Principle, are based on the astonishing assumption that motion of a constrained system in nature follows a path that minimizes the action integral. As a consequence, solving the equations of motion is reduced to finding the optimum path that minimizes the action integral. The fact that nature follows optimization principles is nonintuitive, and was considered to be metaphysical by many scientists and philosophers during the \(19^{th}\) century, which delayed full acceptance of analytical mechanics until the development of the Theory of Relativity and quantum mechanics. Variational formulations now have become the preeminent approach in modern physics and they have toppled Newtonian mechanics from the throne of classical mechanics that it occupied for two centuries.
The scope of this book extends beyond the typical classical mechanics textbook in order to illustrate how Lagrangian and Hamiltonian dynamics provides the foundation upon which modern physics is built. Knowledge of analytical mechanics is essential for the study of modern physics. The techniques and physics discussed in this book reappear in different guises in many fields, but the basic physics is unchanged illustrating the intellectual beauty, the philosophical implications, and the unity of the field of physics. The breadth of physics addressed by variational principles in classical mechanics, and the underlying unity of the field, are epitomized by the wide range of dimensions, energies, and complexity involved. The dimensions range from as large as \(10^{27}\) \(m\), to quantal analogues of classical mechanics of systems spanning in size down to the Planck length of \(1.62 \times 10^{−35} \) \(m\). Individual particles have been detected with kinetic energies ranging from zero to greater than \(10^{15}\) eV. The complexity of classical mechanics spans from one body to the statistical mechanics of many-body systems. As a consequence, analytical variational methods have become the premier approach to describe systems from the very largest to the smallest, and from one-body to many-body dynamical systems.
The goal of this book has been to illustrate the astonishing power of analytical variational methods for understanding the physics underlying classical mechanics, as well as extensions to modern physics. However, the present narrative remains unfinished in that fundamental philosophical and technical questions have not been addressed. For example, analytical mechanics is based on the validity of the assumed principle of economy. This book has not addressed the philosophical question, “is the principle of economy a fundamental law of nature, or is it a fortuitous consequence of the fundamental laws of nature?”
In summary, Hamilton’s action principle, which is built into Lagrangian and Hamiltonian mechanics, coupled with the availability of a wide arsenal of variational principles and mathematical techniques, provides a remarkably powerful approach for deriving the equations of motions required to determine the response of systems in a broad and diverse range of applications in science and engineering.