
9.5: Simple Machines



( \newcommand{\kernel}{\mathrm{null}\,}\)
Learning Objectives
By the end of this section, you will be able to:
- Describe different simple machines.
- Calculate the mechanical advantage.
Simple machines are devices that can be used to multiply or augment a force that we apply – often at the expense of a distance through which we apply the force. The word for “machine” comes from the Greek word meaning “to help make things easier.” Levers, gears, pulleys, wedges, and screws are some examples of machines. Energy is still conserved for these devices because a machine cannot do more work than the energy put into it. However, machines can reduce the input force that is needed to perform the job. The ratio of output to input force magnitudes for any simple machine is called its mechanical advantage (MA).
MA=FoFi
One of the simplest machines is the lever, which is a rigid bar pivoted at a fixed place called the fulcrum. Torques are involved in levers, since there is rotation about a pivot point. Distances from the physical pivot of the lever are crucial, and we can obtain a useful expression for the MA in terms of these distances.
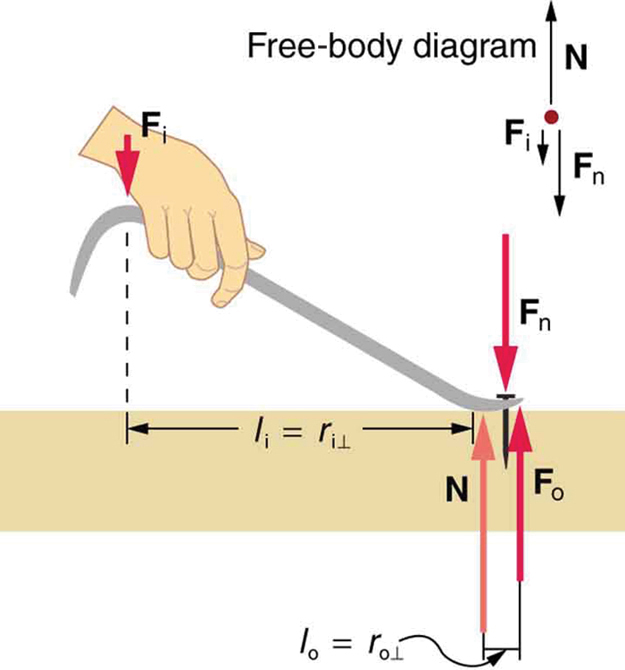
Figure shows a lever type that is used as a nail puller. Crowbars, seesaws, and other such levers are all analogous to this one Fi is the input force and Fo is the output force. There are three vertical forces acting on the nail puller (the system of interest) – these are Fi, Fo, and N. Fn is the reaction force back on the system, equal and opposite to Fo. (note that Fo is not a force on the system.) N is the normal force upon the lever, and its torque is zero since it is exerted at the pivot. The torques due to Fi and Fn must be equal to each other if the nail is not moving, to satisfy the second condition for equilibrium (netτ=0). (In order for the nail to actually move, the torque due to Fi must be ever-so-slightly greater than torque due to Fn.) Hence,
liFi=loFo where li and lo are the distances from where the input and output forces are applied to the pivot, as shown in the figure. Rearranging the last equation gives FoFi=lilo. What interests us most here is that the magnitude of the force exerted by the nail puller,Fo, is much greater than the magnitude of the input force applied to the puller at the other end, Fi. For the nail puller, MA=FoFi=lilo.
This equation is true for levers in general. For the nail puller, the MA is certainly greater than one. The longer the handle on the nail puller, the greater the force you can exert with it.
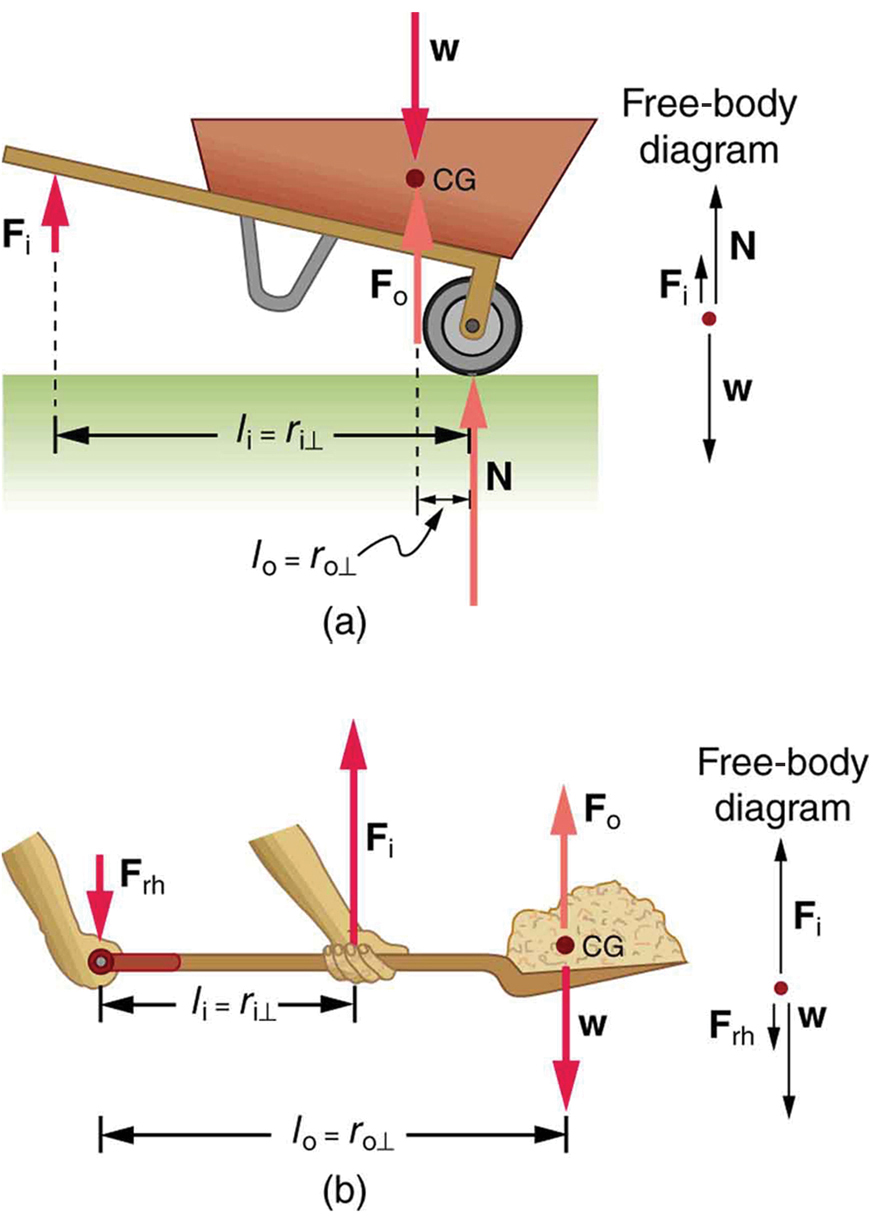
Two other types of levers that differ slightly from the nail puller are a wheelbarrow and a shovel, shown in Figure. All these lever types are similar in that only three forces are involved – the input force, the output force, and the force on the pivot – and thus their MAs are given by MA=FoFi and MA=d1d2, with distances being measured relative to the physical pivot. The wheelbarrow and shovel differ from the nail puller because both the input and output forces are on the same side of the pivot.
In the case of the wheelbarrow, the output force or load is between the pivot (the wheel’s axle) and the input or applied force. In the case of the shovel, the input force is between the pivot (at the end of the handle) and the load, but the input lever arm is shorter than the output lever arm. In this case, the MA is less than one.
Example 9.5.1: What is the Advantage for the Wheelbarrow?
In the wheelbarrow of Figure, the load has a perpendicular lever arm of 7.50 cm, while the hands have a perpendicular lever arm of 1.02 m. (a) What upward force must you exert to support the wheelbarrow and its load if their combined mass is 45.0 kg? (b) What force does the wheelbarrow exert on the ground?
Strategy
Here, we use the concept of mechanical advantage.
Solution
(a) In this case, FoFi=lilo becomes Fi=Fololi,
Adding values into this equation yields
Fi=(45.0kg)(9.80m/s2)0.075 m1.02m=32.4N.
The free-body diagram (see Figure) gives the following normal force: Fi=+N=W. Therefore,
N=(45.0kg)(9.80m/s2)−32.4N=409N.
N is the normal force acting on the wheel; by Newton’s third law, the force the wheel exerts on the ground is 409N.
Discussion
An even longer handle would reduce the force needed to lift the load. The MA here is MA=1.01/0.0750=13.6
Another very simple machine is the inclined plane. Pushing a cart up a plane is easier than lifting the same cart straight up to the top using a ladder, because the applied force is less. However, the work done in both cases (assuming the work done by friction is negligible) is the same. Inclined lanes or ramps were probably used during the construction of the Egyptian pyramids to move large blocks of stone to the top.
A crank is a lever that can be rotated 360o about its pivot, as shown in Figure. Such a machine may not look like a lever, but the physics of its actions remain the same. The MA for a crank is simply the ratio of the radii ri/ro. Wheels and gears have this simple expression for their MAs too. The MA can be greater than 1, as it is for the crank, or less than 1, as it is for the simplified car axle driving the wheels, as shown. If the axle’s radius is 2.0cm and the wheel's radius is 24.0cm, then MA=2.0/24.0=0.083 and the axle would have to exert a force of 12,000N on the wheel to enable it to exert a force of 1000N on the ground.
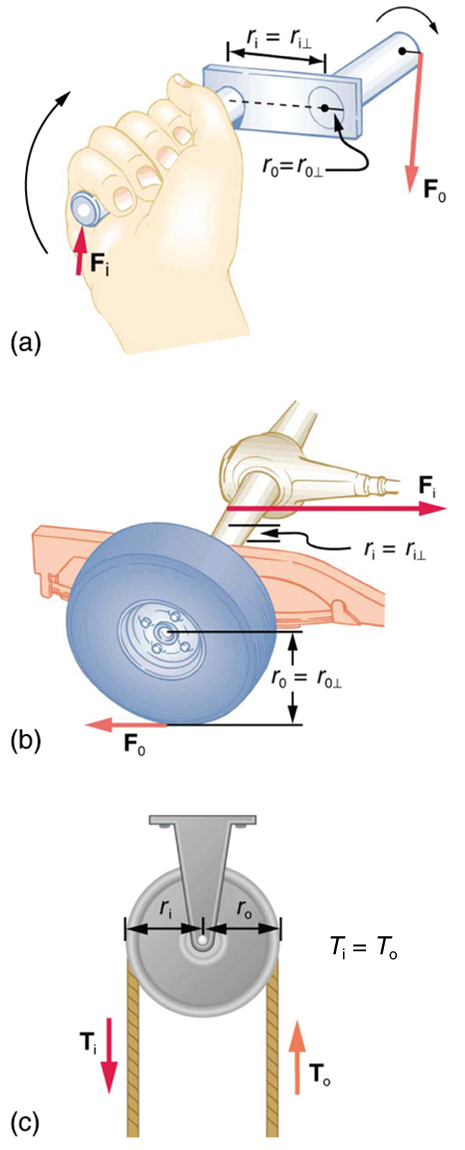
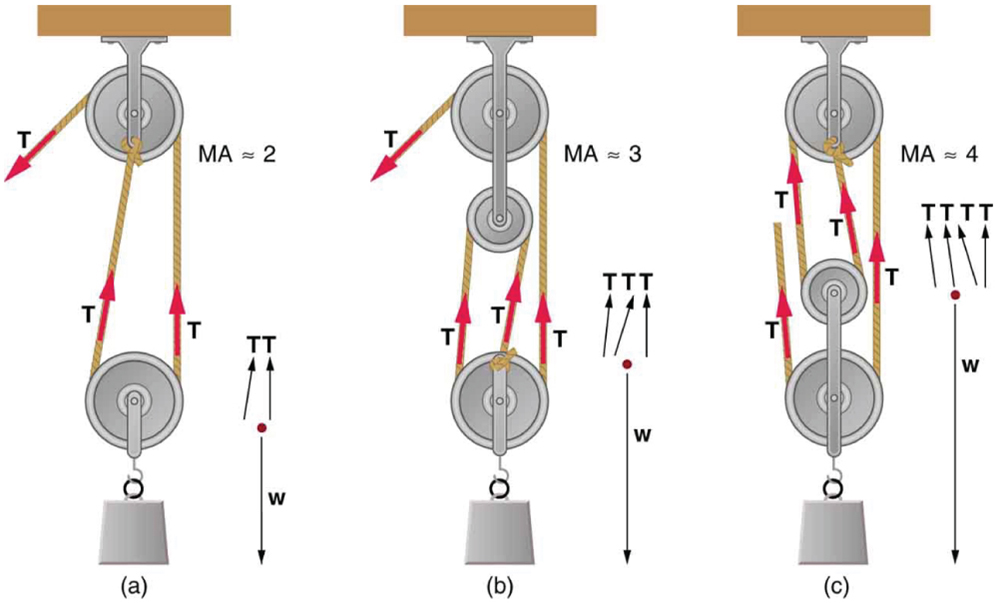
An ordinary pulley has an MA of 1; it only changes the direction of the force and not its magnitude. Combinations of pulleys, such as those illustrated in Figure, are used to multiply force. If the pulleys are friction-free, then the force output is approximately an integral multiple of the tension in the cable. The number of cables pulling directly upward on the system of interest, as illustrated in the figures given below, is approximately the MA of the pulley system. Since each attachment applies an external force in approximately the same direction as the others, they add, producing a total force that is nearly an integral multiple of the input force T.
Summary
- Simple machines are devices that can be used to multiply or augment a force that we apply – often at the expense of a distance through which we have to apply the force.
- The ratio of output to input forces for any simple machine is called its mechanical advantage
- A few simple machines are the lever, nail puller, wheelbarrow, crank, etc.
Glossary
- mechanical advantage
- the ratio of output to input forces for any simple machine