5.1: From Triads and Euler Angles to Spinors - A Heuristic Introduction
- Page ID
- 31973

As mentioned already in Section 3.4.3, it is an obvious idea to enrich the Pauli algebra formalism by introducing the complex vector space V(2, C) on which the matrices operate. The two-component complex vectors are traditionally called spinors. We wish to show that they give rise to a wide range of applications. In fact we shall introduce the spinor concept as a natural answer to a problem that arises in the context of rotational motion.
In Section 3 we have considered rotations as operations performed on a vector space. Whereas this approach enabled us to give a group-theoretical definition of the magnetic field, a vector is not an appropriate construct to account for the rotation of an orientable object. The simplest mathematical model suitable for this purpose is a Cartesian (orthogonal) three-frame, briefly, a triad. The problem is to consider two triads with coinciding origins, and the rotation of the object frame is described with respect to the space frame. The triads are represented in terms of their respective unit vectors: the space frame as \(\Sigma_{s}\left(\hat{x}_{1}, \hat{x}_{2}, \hat{x}_{3}\right)\) and the object frame as \(\Sigma_{c}\left(\hat{e}_{1}, \hat{e}_{2}, \hat{e}_{3}\right)\) Here c stands for “corpus,” since o for “object” seems ambiguous. We choose the frames to be right-handed.
These orientable objects are not pointlike, and their parametrization offers novel problems. In this sense we may refer to triads as “higher objects,” by contrast to points which are “lower objects.” The thought that comes most easily to mind is to consider the nine direction cosines \(\hat{e}_{i} \cdot \hat{x}_{k}\) but this is impractical, because of the six relations connecting these parameters. This difficulty is removed by the three independent Eulerian angles, a most ingenious set of constructs, which leave us nevertheless with another problem: these parameters do not have good algebraic properties; their connection with the ordinary Euclidean vector space is provided by rather cumbersome relations. This final difficulty is solved by the spinor concept.
The theory of the rotation of triads has been usually considered in the context of rigid body mechanics According to the traditional definition a rigid body is “a collection of point particles keeping rigid distances.” Such a system does not lend itself to useful relativistic generalization. Nor is this definition easily reconciled with the Heisenberg principle of uncertainty.
Since the present discussion aims at applications to relativity and quantum mechanics, we hasten to point out that we consider a triad as a precise mathematical model to deal with objects that are orientable in space. Although we shall briefly consider the rigid body rotation in Section 5.2, the concept of rigidity in the sense defined above is not essential in our argument. We turn now to a heuristic argument that leads us in a natural fashion from triad rotation to the spinor concept. According to Euler’s theorem any displacement of a rigid body fixed at a point \(O\) is equivalent to a rotation around an axis through \(O\). (See [Whi64], page 2.)
This theorem provides the justification to describe the orientational configuration of \(\Sigma_{c}\) in terms of the unitary matrix in \(\operatorname{su}(2)\) that produces the configuration in question from the standard position in which the two frames coincide. Denoting the unitary unimodular matrices corresponding to two configuration by \(V_{1}, V_{2}\) a transition between them is conveyed by an operator U
\[V_{2}=U V_{1}\label{1}\]
Let
\[\begin{equation}
\begin{aligned}
V &=\cos \frac{\phi}{2} 1-i \sin \frac{\phi}{2} \hat{v} \cdot \vec{\sigma} \\
&=q_{0} 1-i \vec{q} \cdot \vec{\sigma}
\end{aligned}
\end{equation}\label{2}\]
Here \(q_{0}, \vec{q}\) are the so-called quaternion components, since the \(\left(-i \sigma_{k}\right)\) obey the commutation rules of the quaternion units \(e_{k}: e_{1} e_{2}=-e_{2} e_{1}=e_{3}\). We have
\[|V|=q_{0}^{2}+\vec{q}^{2}=q_{0}^{2}+q_{1}^{2}+q_{2}^{2}+q_{3}^{2}=1\label{3}\]
The Equations \ref{1} - \ref{3} can be given an elegant geometrical interpretation: \(q_{0}, \vec{q}\) are considered as the coordinates of a point on the three-dimensional unit hypersphere in four-dimensional space \(\mathcal{V}(4, R)\) Thus the rotation of the triad is mapped on the rotation of this hypersphere. The operation leaves \ref{3} invariant.
The formalism is that of elliptic geometry, a counterpart to the hyperbolic geometry in Minkowski space.
This geometry implies a “metric”: the “distance” of two displacements \(V_{1}, \text { and } V_{2}\) is defined as
\[\frac{1}{2} \operatorname{Tr}\left(V_{2} \tilde{V}_{1}\right)=\cos \frac{\phi_{1}}{2} \cos \frac{\phi_{2}}{2}+\sin \frac{\phi_{1}}{2} \sin \frac{\phi_{2}}{2} \hat{v}_{1} \cdot \hat{v}_{2}\label{4}\]
\[=\cos \frac{\phi}{2}=q_{10} q_{20}+\vec{q}_{1} \cdot \vec{q}_{2}\label{5}\]
where φ is the angle of rotation carrying \(V_{1}\), into \(V_{2}\). Note the analogy with the hyperbolic formula 3.4.67 in Section 3.4.3.
We have here an example for an interesting principle of geometry: a “higher object” in a lower space can be often represented as a “lower object,” i.e., a point in a higher space. The “higher object” is a triad in ordinary space \(\mathcal{V}(3, R)\). It is represented as a point in the higher space \(\mathcal{V}(4, R)\).
We shall see that this principle is instrumental in the intuitive interpretation of quantum mechanics. The points in the abstract spaces of this theory are to be associated with complex objects in ordinary space.
Although the representation of the rotation operator \(U\) and the rotating object V in terms of the same kind of parametrization can be considered a source of mathematical elegance, it also has a shortcoming. Rotating objects may exhibit a preferred intrinsic orientation, such as a figure axis, or the electron spin, for which there is no counterpart in Equations \ref{1} and \ref{3}.
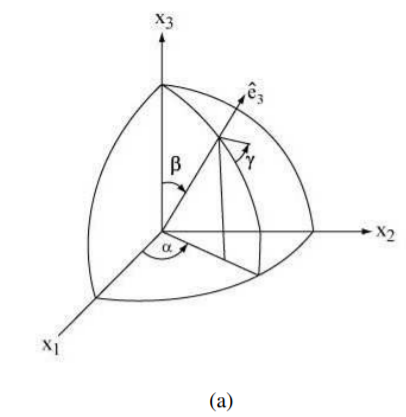
This situation is remedied by the following artifice. Let the figure axis point along the unit vector \(\hat{e}_{3}\) that coincides in the standard position with \(\hat{x}_{3}\) Instead of generating the object matrix V in terms of single rotation, we consider the following standard sequence to be read from right to left, (see Figure 5.1):
\[U\left(\hat{x}_{3}, \frac{\alpha}{2}\right) U\left(\hat{x}_{2}, \frac{\beta}{2}\right) U\left(\hat{x}_{3}, \frac{\gamma}{2}\right)=V(\alpha, \beta, \gamma)\label{6}\]
Here \(\alpha, \beta, \gamma\) are the well known Euler angles, and the sequence of rotations is one of the variants traditionally used for their definition.
The notation calls for explanation. We shall continue to use, as we did in Section 3, \(U(\hat{u}, \phi / 2)\) for the 2 × 2 unitary matrix parametrized in terms of axis angle variables. We shall call this also a uniaxial parametrization, to be distinguished from the biaxial parametrization of the unitary V matrices in which both the spatial direction \(\hat{x}_{3}, \text { and the figure axis } \hat{e}_{3}\) play a preferred role.
In Equation \ref{6} the rotations are defined along axes specified in the space frame \(\Sigma_{s}\). However, in the course of each operation the axis is fixed in both frames. Thus it is merely a matter of another name (an alias I) to describe the operation (4) in \(\Sigma_{c}\). We have then for the same unitary matrix
\[V(\alpha, \beta, \gamma)=U\left(\hat{e}_{3}, \frac{\gamma}{2}\right) U\left(\hat{e}_{2}, \frac{\beta}{2}\right) U\left(\hat{e}_{3}, \frac{\alpha}{2}\right)\label{7}\]
Note the inversion of the sequence of operations involving the rotations a and y. This relation is to be interpreted in the kinematic sense: the body frame moves from the initial orientation of coincidence with \(\Sigma_{s}\) into the final position.
The equivalence of \ref{6} and \ref{7} can be recognized by geometrical intuition, or also by explicit transformations between \(\Sigma_{s} \text { and } \Sigma_{c}\) (See [Got66], p 268).
In the literature one often considers the sequence
\[U\left(\hat{x}_{3}^{\prime \prime}, \frac{\gamma}{2}\right) U\left(\hat{x}_{2}^{\prime}, \frac{\beta}{2}\right) U\left(\hat{x}_{3}, \frac{\alpha}{2}\right)\label{8}\]
where \(\hat{x}_{2}^{\prime}, \text { and } \hat{x}_{3}^{\prime \prime}\) are axis positions after the first and the second step respectively. This procedure seems to have the awkward property that the different rotations are performed in different spaces. On closer inspection, however, one notices that Equation \ref{8} differs only in notation from Equation \ref{7}. In the usual static interpretation \(\hat{e}_{1}, \hat{e}_{2}, \hat{e}_{3}\) is used only for the final configuration, and \(\hat{x}_{2}^{\prime}, \hat{x}_{3}^{\prime \prime}\) are introduced as auxiliary axes. If, in contrast, one looks at the object frame kinematically, one realizes that at the instant of the particular rotations the following axes coincide:
\[\hat{x}_{3}=\hat{e}_{3}, \quad \hat{x}_{2}^{\prime}=\hat{e}_{2}, \quad \hat{x}_{3}^{\prime \prime}=\hat{e}_{3},\label{9}\]
We now write Equation \ref{6} explicitly as
\[\begin{equation}
\begin{aligned}
V(\alpha, \beta, \gamma) &=U\left(\hat{x}_{3}, \frac{\alpha}{2}\right) U\left(\hat{x}_{2}, \frac{\beta}{2}\right) U\left(\hat{x}_{3}, \frac{\gamma}{2}\right) \\
&=\left(\begin{array}{cc}
e^{-i \alpha / 2} & 0 \\
0 & e^{i \alpha / 2}
\end{array}\right)\left(\begin{array}{cc}
\cos (\beta / 2) & -\sin (\beta / 2) \\
\sin (\beta / 2) & \cos (\beta / 2)
\end{array}\right)\left(\begin{array}{cc}
e^{-i \gamma / 2} & 0 \\
0 & e^{i \gamma / 2}
\end{array}\right) \\
&=\left(\begin{array}{cc}
e^{-i \alpha / 2} \cos (\beta / 2) e^{-i \gamma / 2} & -e^{-i \alpha / 2} \sin (\beta / 2) e^{i \gamma / 2} \\
e^{i \alpha / 2} \sin (\beta / 2) e^{-i \gamma / 2} & e^{i \alpha / 2} \cos (\beta / 2) e^{i \gamma / 2}
\end{array}\right) \\
&=\left(\begin{array}{cc}
\xi_{0} & -\xi_{1}^{*} \\
\xi_{1} & \xi_{0}^{*}
\end{array}\right)
\end{aligned}
\end{equation}\label{10}\]
with
\[\begin{equation}
\begin{array}{l}
\xi_{0}=e^{-i \alpha / 2} \cos (\beta / 2) e^{-i \gamma / 2} \\
\xi_{1}=e^{i \alpha / 2} \sin (\beta / 2) e^{-i \gamma / 2}
\end{array}
\end{equation}\label{11}\]
The four matrix elements appearing in this relation are the so-called Cayley-Klein parameters. (See Equation 3.4.43 in Section 3.4.2.)
It is a general property of the matrices of the algebra \(\mathcal{A}_{2}\), that they can be represented either in terms of components or in terms of matrix elements. We have arrived at the conclusion that the representation of a unitary matrix in terms of elements is suitable for the parametrization of orientational configuration, while the rotation operator is represented in terms of components (axisangle variables).
There is one more step left to express this result most efficiently. We introduce the two-component complex vectors (spinors) of \(\mathcal{V}(2, C)\) already mentioned at the beginning of the chapter. In particular, we define two conjugate column vectors, or ket spinors:
\[|\xi\rangle=\left(\begin{array}{l}
\xi_{0} \\
\xi_{1}
\end{array}\right), \quad|\bar{\xi}\rangle=\left(\begin{array}{c}
-\xi_{1}^{*} \\
\xi_{0}^{*}
\end{array}\right)\label{12}\]
and write the unitary V matrix symbolically as
\[V=(\langle\xi|| \mid \bar{\xi}\rangle)\label{13}\]
We define the corresponding bra vectors by splitting the Hermitian conjugate V horizontally into row vectors:
\[V^{\dagger}=\left(\begin{array}{cc}
\xi_{0}^{*} & \xi_{1}^{*} \\
-\xi_{1} & \xi_{0}
\end{array}\right)=\left(\begin{array}{c}
\langle\xi| \\
\langle\bar{\xi}|
\end{array}\right)\label{14}\]
or
\[\langle\xi|=\left(\xi_{0}^{*}, \xi_{1}^{*}\right) ; \quad\langle\bar{\xi}|=\left(-\xi_{1}, \xi_{0}\right)\label{15}\]
The condition of unitarity of V can be expressed as
\[V^{\dagger} V=\left(\begin{array}{c}
\langle\xi| \\
\langle\bar{\xi}|
\end{array}\right)(|\xi\rangle,|\bar{\xi}\rangle)\label{16}\]
\[=\left(\begin{array}{cc}
\langle\xi \mid \xi\rangle & \langle\xi \mid \bar{\xi}\rangle \\
\langle\bar{\xi} \mid \xi\rangle & \langle\bar{\xi} \mid \bar{\xi}\rangle
\end{array}\right)=\left(\begin{array}{cc}
1 & 0 \\
0 & 1
\end{array}\right)\label{17}\]
yielding at once the conditions of orthonormality
\[\begin{equation}
\begin{array}{l}
\langle\xi \mid \xi\rangle=\langle\bar{\xi} \mid \bar{\xi}\rangle=1 \\
\langle\xi \mid \bar{\xi}\rangle=\langle\bar{\xi} \mid \xi\rangle=0
\end{array}
\end{equation}\label{18}\]
These can be, of course, verified by direct calculation. The orthogonal spinors are also called conjugate spinors. We see from these relations that our definition of spin conjugation is, indeed, a sensible one. However, the meaning of this concept is richer than the analogy with the ortho-normality relation in the real domain might suggest.
First of all we express spin conjugation in terms of a matrix operation. The relation is nonlinear, as it involves the operation of complex conjugation \(\mathcal{K}\).
We have
\[|\bar{\xi}\rangle=\left(\begin{array}{cc}
0 & -1 \\
1 & 0
\end{array}\right) \mathcal{K}|\xi\rangle=-i \sigma_{2} \mathcal{K}|\xi\rangle\label{19}\]
and
\[\langle\bar{\xi}|=\mathcal{K}\langle\xi|\left(\begin{array}{cc}
0 & 1 \\
-1 & 0
\end{array}\right)=\mathcal{K}\langle\xi| i \sigma_{2}\label{20}\]
We obtain from here
\[|\bar{\xi}\rangle=-|\xi\rangle, \quad\langle\bar{\xi}|=-\langle\xi|\label{21}\]
The bar notation for spin conjugation suggests a connection with the complex reflection of the Pauli algebra. We shall see that such a connection indeed exists. However, we have to remember that, in contrast to Equation \ref{21}, complex reflection is involutive, i.e., its iteration is the identit \(\overline{\bar{A}}=A\).
The emergence of the negative sign in Equation \ref{21} is a well known property of the spin function, however we have to defer the discussion of this intriguing fact for later.
We shall occasionally refer to spinors normalized according to Equation \ref{18} as unitary spinors, in order to distinguish them from relativistic spinors normalized as \(\langle\xi \mid \xi\rangle=k_{0}\) where \(k_{0}\) is the 0-th component of a four-vector.
Let us take a closer look at the connection between spinors and triads. In our heuristic procedure we started with an object triad specified by three orthonormal unit vectors \(\hat{e}_{1}, \hat{e}_{2}, \hat{e}_{3}\) and arrived at an equivalent specification in terms of an associated spinor \(|\xi\rangle\). Our task is now to start from the spinor and establish the corresponding triad in terms of its unit vectors. This is achieved by means of quadratic expressions.
We consider the so-called outer products
\[\begin{equation}
\begin{aligned}
|\xi\rangle\langle\xi| &=\left(\begin{array}{c}
\xi_{0} \\
\xi_{1}
\end{array}\right)\left(\xi_{0}^{*}, \xi_{1}^{*}\right) \\
&=\left(\begin{array}{cc}
\xi_{0} \xi_{0}^{*} & \xi_{0} \xi_{1}^{*} \\
\xi_{1} \xi_{0}^{*} & \xi_{1} \xi_{1}^{*}
\end{array}\right)
\end{aligned}
\end{equation}\label{22}\]
and
\[\begin{equation}
\begin{aligned}
|\xi\rangle\langle\bar{\xi}| &=\left(\begin{array}{c}
\xi_{0} \\
\xi_{1}
\end{array}\right)\left(-\xi_{1}, \xi_{0}\right) \\
&=\left(\begin{array}{cc}
-\xi_{0} \xi_{1} & \xi_{0}^{2} \\
-\xi_{1}^{2} & \xi_{0} \xi_{1}
\end{array}\right)
\end{aligned}
\end{equation}\label{23}\]
which can be considered as products of a \(2 × 1\) and \(1 × 2\) matrix.
In order to establish the connection with the unit vectors \(\hat{e}_{k}\), we consider first the unit configuration in which the triads coincide: \(\alpha=\beta=\gamma=0\) i.e.
\[\xi_{0}=1, \xi_{1}=0 \quad \text { or } \quad|\xi\rangle=\left(\begin{array}{l}1 \\0\end{array}\right)\label{24}\]
with
\[|\bar{\xi}\rangle=\left(\begin{array}{l}0 \\1\end{array}\right)\label{25}\]
Denoting these spinors briefly as \(|1\rangle \text { and }|\overline{1}\rangle\) respectively, we obtain from \ref{22} and \ref{23}
\[|1\rangle\langle 1|=\left(\begin{array}{cc}
1 & 0 \\
0 & 0
\end{array}\right)=\frac{1}{2}\left(1+\sigma_{3}\right)=\frac{1}{2}\left(1+\hat{x}_{3} \cdot \vec{\sigma}\right)\label{26}\]
\[|1\rangle\langle\overline{1}|=\left(\begin{array}{ll}
0 & 1 \\
0 & 0
\end{array}\right)=\frac{1}{2}\left(\sigma_{1}+i \sigma_{2}\right)=\frac{1}{2}\left(\hat{x}_{1}+i \hat{x}_{2}\right) \cdot \vec{\sigma}\label{27}\]
Let V be the unitary matrix that carries the object frame from the unit position into \(\Sigma_{c}\left(\hat{e}_{1}, \hat{e}_{2}, \hat{e}_{3}\right)\) Since \(V^{\dagger}=V^{-1} \text {and } \bar{V}=V\), we have
\[V|1\rangle=|\xi\rangle \quad V|\overline{1}\rangle=|\bar{\xi}\rangle\label{28}\]
\[\langle 1| V^{-1}=\langle\xi| \quad\langle\overline{1}| V^{-1}=\langle\bar{\xi}|\label{29}\]
By operating on \ref{26} and \ref{27} from left and right by \(V \text { and } V^{-1}\) respectively, we obtain
\[|\xi\rangle\langle\xi|=\frac{1}{2}\left(1+\hat{e}_{3} \cdot \vec{\sigma}\right)\label{30}\]
\[|\xi\rangle\langle\bar{\xi}|=\frac{1}{2}\left(\hat{e}_{1}+i \hat{e}_{2}\right) \cdot \vec{\sigma}\label{31}\]
and hence, by using Equation 3.4.13 of Section 3.4.2,
\[\hat{e}_{1}=\operatorname{Tr}(|\xi\rangle\langle\xi| \vec{\sigma})=\langle\xi|\vec{\sigma}| \xi\rangle\label{32}\]
\[\hat{e}_{1}+i \hat{e}_{2} \equiv \hat{e}_{+}=\operatorname{Tr}(|\xi\rangle\langle\bar{\xi}| \vec{\sigma})=\langle\bar{\xi}|\vec{\sigma}| \xi\rangle\label{33}\]
We have used here the rule:
\[\operatorname{Tr}(|\xi\rangle\langle\eta|)=\langle\eta \mid \xi\rangle\label{34}\]
Equations \ref{32} and \ref{33} constitute a most compact expression for the relation between a spinor and its associated triad. One can extract from here the values of the direction cosines
\[\hat{e}_{j} \cdot \hat{x}_{k} \equiv e_{j k} \quad j, k=1,2,3\label{35}\]
\[\begin{equation}
\begin{array}{l}
\hat{e}_{31}=\left\langle\xi\left|\sigma_{1}\right| \xi\right\rangle=\xi_{0} \xi_{1}^{*}+\xi_{0}^{*} \xi_{1}=\Re\left(\xi_{0}^{*} \xi_{1}\right) \\
\hat{e}_{32}=\left\langle\xi\left|\sigma_{2}\right| \xi\right\rangle=i\left(\xi_{0} \xi_{1}^{*}-\xi_{0}^{*} \xi_{1}\right)=\Im\left(\xi_{0}^{*} \xi_{1}\right) \\
\hat{e}_{33}=\left\langle\xi\left|\sigma_{3}\right| \xi\right\rangle=\xi_{0} \xi_{0}^{*}+\xi_{1}^{*} \xi_{1} \quad(c)
\end{array}
\end{equation}\label{36}\]
\[\begin{equation}
\begin{aligned}
\hat{e}_{11}+i \hat{e}_{21} &=\left\langle\bar{\xi}\left|\sigma_{1}\right| \xi\right\rangle=\xi_{0}^{2}-\xi_{1}^{2} \\
\hat{e}_{12}+i \hat{e}_{22} &=\left\langle\bar{\xi}\left|\sigma_{2}\right| \xi\right\rangle=i\left(\xi_{0}^{2}+\xi_{1}^{2}\right) \\
\hat{e}_{13}+i \hat{e}_{23} &=\left\langle\bar{\xi}\left|\sigma_{3}\right| \xi\right\rangle=-2 \xi_{0} \xi_{1} \quad(c)
\end{aligned}
\end{equation}\label{37}\]
By using Equation \ref{11} we obtain these quantities in terms of Euler angles
\[\begin{equation}
\begin{array}{l}
e_{31}=\sin \beta \cos \alpha \\
e_{32}=\sin \beta \sin \alpha \\
e_{33}=\cos \beta
\end{array}
\end{equation}\label{38}\]
\[\begin{equation}
\begin{aligned}
e_{11}=\cos \gamma \cos \beta \cos \alpha-\sin \gamma \sin \alpha &&&& e_{21}=-\sin \gamma \cos \beta \cos \alpha-\cos \gamma \sin \alpha \\
e_{12}=\cos \gamma \cos \beta \sin \alpha+\sin \gamma \cos \alpha &&&& e_{22}=-\sin \gamma \cos \beta \sin \alpha+\cos \gamma \cos \alpha \\
e_{13}=-\cos \gamma \sin \beta &&&& e_{23}=\sin \gamma \sin \beta
\end{aligned}
\end{equation}\label{39}\]
The relation between vectors and spinors displayed in Equations \ref{36} can be established also by means of a stereographic projection. This method yields quicker results than the present lengthy build-up which in turn has a wider scope. Instead of rotating vector spaces, we operate on triads and thus obtain also Equation \ref{37}. To my knowledge, this relation has not appeared in the literature.
The Equations \ref{36} and \ref{37} solve the parametrization problem stated at the beginning of this chapter. The nine interrelated direction cosines \(e_{j k}\) are expressed by the three independent spinor parameters.
This is the counterpart of the parametrization problem concerning the nine parameters of the \(S \mathcal{O}(3)\) matrices (see page 13), a problem that has been solved by the \(\mathcal{S U}(2)\) representation \(\mathcal{S O}(3)\) with the unitary matrices \(U(\hat{u}, \phi / 2)\).
It is noteworthy that the decisive step was taken in both cases by Euler who introduced the “Euler angles” \(\alpha, \beta, \gamma\) and also the axis-angle parameters \(\hat{u}, \phi\) for the rotation operators.
Euler’s results come to fruition in the version of spinor calculus in which spinors representing orientational states are parametrized in terms of Euler angles and the unitary operators in terms of \(\hat{u}, \phi\).
We propose to demonstrate the ease by which this formalism lends itself to algebraic operations. This stems particularly from the constructs \ref{30} and \ref{31} in which we recognize the singular matrices of Table 3.2 (page 46).
We define more fully
\[\begin{equation}
\begin{aligned}
|\xi\rangle\langle\xi| &=\frac{1}{2}\left(1+\hat{e}_{3} \cdot \vec{\sigma}\right) \equiv E_{3} \\
|\bar{\xi}\rangle\langle\bar{\xi}| &=\frac{1}{2}\left(1-\hat{e}_{3} \cdot \vec{\sigma}\right) \equiv \bar{E}_{3} \\
|\xi\rangle\langle\bar{\xi}| &=\frac{1}{2}\left(\hat{e}_{1}+i \hat{e}_{2}\right) \cdot \vec{\sigma} \equiv E_{+} \\
|\bar{\xi}\rangle\langle\xi| &=\frac{1}{2}\left(\hat{e}_{1}-i \hat{e}_{2}\right) \cdot \vec{\sigma} \equiv E_{-}=-\bar{E}_{+}
\end{aligned}
\end{equation}\label{40}\]
Here \(E_{3}, \bar{E}_{3}\) are idempotent projection operators and \(E_{+}, E\) nilpotent step operators. Since \(E_{3}+ bar{E}_{3}=1\), we have
\[|\eta\rangle=|\xi\rangle\langle\xi \mid \eta\rangle+|\bar{\xi}\rangle\langle\bar{\xi} \mid \eta\rangle\label{41}\]
\[=|\xi\rangle a_{0}+|\bar{\xi}\rangle a_{1}\label{42}\]
with
\[a_{0}=\langle\xi \mid \eta\rangle, \quad a_{1}=\langle\bar{\xi} \mid \eta\rangle\label{43}\]
Also
\[E_{+}|\bar{\xi}\rangle=|\xi\rangle \quad E_{-}|\xi\rangle=|\bar{\xi}\rangle\label{44}\]
\[E_{+}|\xi\rangle=0 \quad E_{-}|\bar{\xi}\rangle=0\label{45}\]
We see from Equations \ref{40} that the transition \(|\xi\rangle \rightarrow|\bar{\xi}\rangle\) corresponds to an inversion of the figure axis with a simultaneous inversion of the figure axis with a simultaneous inversion of the \(\gamma\)-rotation around the axis. Therefore the transformation corresponds to a transition from a right to a left frame with a simultaneous change from counterclockwise to clockwise as the positive sense of rotation. Thus we should look at the transition from \ref{40} as \(E_{+} \rightarrow \bar{E}_{+}\) or
\[\frac{1}{2}\left(\hat{e}_{1}+i \hat{e}_{2}\right) \cdot \vec{\sigma} \rightarrow \frac{1}{2}\left[-\hat{e}_{1}-i\left(-\hat{e}_{2}\right)\right] \cdot \vec{\sigma}\label{46}\]
All this is apparent also if we represent the transition \(|\xi\rangle \rightarrow|\bar{\xi}\rangle\) in terms of Euler angles as
\[\alpha \rightarrow \pi+\alpha\label{47}\]
\[\beta \rightarrow \pi-\beta\label{48}\]
\[\gamma \rightarrow \pi-\gamma\label{49}\]
We note also the following relations for later use:
\[E_{-} E_{+}=\bar{E}_{3}, \quad E_{+} E_{-}=E_{3}\label{50}\]
In addition to the short symbols \(|\xi\rangle,|\bar{\xi}\rangle\) for spinors and their conjugates, we shall use also more explicit notations depending on the context:
\[|\alpha, \beta, \gamma\rangle=|\pi+\alpha, \pi-\beta, \pi-\gamma\rangle\label{51}\]
\[|\hat{k}, \gamma\rangle,|\overline{\hat{k}, \gamma\rangle}=|-\hat{k}, \pi-\gamma\rangle\label{52}\]
\[|\hat{k}\rangle|\overline{\hat{k}}\rangle=|-\hat{k}\rangle\label{53}\]
Here \(\hat{k}\) is the unit vector denoted by \(\hat{e}_{3},\) in Equation \ref{30}. Its association with the spinor is evident from the following eigenvalue problem.
By using Equations \ref{40} and \ref{18} we obtain
\[\frac{1}{2}(1+\hat{k} \cdot \vec{\sigma})|\hat{k}\rangle=|\hat{k}\rangle\langle\hat{k} \mid \hat{k}\rangle=|\hat{k}\rangle\label{54}\]
\[\frac{1}{2}(1-\hat{k} \cdot \vec{\sigma})|\overline{\hat{k}}\rangle=|\overline{\hat{k}}\rangle\langle\overline{\hat{k}} \mid \overline{\hat{k}}\rangle=|\overline{\hat{k}}\rangle\label{55}\]
Hence
\[\hat{k} \cdot \vec{\sigma}|\hat{\rangle} k=| \hat{k}\rangle\label{56}\]
\[\hat{k} \cdot \vec{\sigma}|\hat{\rangle} k=| \hat{k}\rangle\label{57}\]
Thus \(|k\rangle \text { and }|\overline{\hat{k}}\rangle\) are eigenvectors of the Hermitian operator \(\hat{k} \cdot \vec{\sigma}\) with the eigenvalues +1 and −1 respectively. This is a well known result, although usually obtained by a somewhat longer computation.
By using the explicit expression for \(U(\hat{k}, \phi / 2)\) we obtain from \ref{56} and \ref{57}
\[U(\hat{k}, \phi / 2)|\hat{k}, \gamma\rangle=\exp (-i \phi / 2)|\hat{k}, \gamma\rangle=|\hat{k}, \gamma+\phi\rangle\label{58}\]
\[U(\hat{k}, \phi / 2)|\hat{\hat{k}, \gamma}\rangle=\exp (i \phi / 2)|\hat{\hat{k}, \gamma}\rangle=\mid \overline{\hat{k}, \gamma+\phi\rangle}\label{59}\]
There is also the unitary diagonal matrix
\[U\left(\hat{x}_{3}, \phi / 2\right)=\left(\begin{array}{cc}
e^{-i \phi / 2} & 0 \\
0 & e^{-i \phi / 2}
\end{array}\right)\label{60}\]
the effect of which is easily described:
\[U\left(\hat{x}_{3}, \phi / 2\right)|\alpha, \beta, \gamma\rangle=|\alpha+\phi, \beta, \gamma\rangle\label{61}\]
These relations bring out the “biaxial” character of spinors: both \(\hat{x}_{3}, \text { and } \hat{k}\) play a distinguished role. The same is true of a unitary matrix parametrized in terms of Euler angles: \(V(\alpha, \beta, \gamma)\) Cayley-Klein parameters. This is to be contrasted with the uniaxial form \(U(\hat{u}, \phi / 2)\).
Our discussion in this chapter has been thus far purely geometrical although active transformations of geometrical objects can be given a kinematic interpretation. We go now one step further and introduce the conept of time. By setting \(\phi=\omega t\) with a constant \(\omega\) in the unitary rotation operator we obtain the description of rotation processes:
\[\begin{array}{l}
U\left(\hat{k}, \frac{\omega t}{2}\right)\left|\hat{k}, \frac{\gamma}{2}\right\rangle=\exp (-i \omega t / 2)\left|\hat{k}, \frac{\gamma}{2}\right\rangle=\left|\hat{k}, \frac{\gamma+\omega t}{2}\right\rangle \\
U\left(\hat{k}, \frac{\omega t}{2}\right)|\hat{k}, \gamma\rangle=\exp (i \omega t / 2)|\hat{k}, \gamma\rangle=\left|\hat{k}, \frac{\gamma+\omega t}{2}\right\rangle
\end{array}\label{62}\]
These rotations are stationary, because U operates on its eigenspinors. There are various ways to represent the evolution of arbitrary spinors as well. We have
\[\begin{equation}
\begin{aligned}
U\left(\hat{k}, \frac{\omega t}{2}\right)|\eta\rangle &=\exp \left(-i \frac{\omega t}{2} \hat{k} \cdot \vec{\sigma}\right)|\eta\rangle \\
\langle\eta| U^{-1}\left(\hat{k}, \frac{\omega t}{2}\right) &=\langle\eta| \exp \left(i \frac{\omega t}{2} \hat{k} \cdot \vec{\sigma}\right)
\end{aligned}
\end{equation}\label{63}\]
Or, in differential form
\[\begin{equation}
\begin{aligned}
i|\dot{\eta}\rangle &=\frac{\omega}{2} \hat{k} \cdot \vec{\sigma}|\eta\rangle \\
-i\langle\dot{\eta}| &=\langle\eta| \frac{\omega}{2} \hat{k} \cdot \vec{\sigma}
\end{aligned}
\end{equation}\label{64}\]
The state functions solving these differential equations are obtained explicitly by using Equations \ref{42}, \ref{43}, \ref{62}, and \ref{63}:
\[|\eta(t)\rangle=U\left(\hat{k}, \frac{\omega t}{2}\right)|\eta(0)\rangle=\exp (-i \omega t / 2)|\hat{k}\rangle a_{0}+\exp (i \omega t / 2)|\overline{\hat{k}}\rangle a_{1}\label{65}\]
and similarly for \(\langle\eta(t)|\)
By introducing the symbol H for the Hermitian operator \(H=(\omega t / 2) \hat{k} \cdot \vec{\sigma}\) in \ref{64} we obtain
\[i|\dot{\eta}\rangle=H|\eta\rangle\label{66}\]
\[-i\langle\dot{\eta}|=\langle\eta| H\label{67}\]
These equations are reminiscent of the Schrödinger ¨ equation. Also it would be easy to derive from here a Heisenberg type operator equation.
It must be apparent to those familiar with quantum mechanics, that our entire spinor formalism has a markedly quantum mechanical flavor. What all this means is that the orientability of objects is of prime importance in quantum mechanics and the concept of the triad provides us with a more direct path to quantization, or to some aspects of it, than the traditional point mass approach.
In order to make use of this opportunity, we have to apply our spinor formalism to physical systems.
Our use of the concept of time in Equations \ref{62}–\ref{66} is quite formal. We merely selected a one-parameter subgroup of the rotation group to describe possible types of stationary rotation.
We have to turn to experiment, or to an experimentally established dynamical theory, to decide whether such motions actually occur in nature. We shall examine this question in connection with the rigid body rotation in the next section.
However, our main objective is the discussion of polarized light. Here the connection between classical and quantum theories is very close and the quantization procedure is particularly clear in terms of the spinor formalism.
The fact that the same formalism can be adjusted both to rigid body motion and to a wave phenomenon is interesting by itself. We know that the particle-wave duality is among the central themes in quantum mechanics. The contrast between these objects is very pronounced if we confine ourselves to point particles and to scalar waves. It is remarkable how this contrast is toned down within the context of rotational problems.