
4.3: Accelerated motion when the velocity vector changes direction



- Last updated
- Mar 28, 2024
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
One key difference with one dimensional motion is that, in two dimensions, it is possible to have an acceleration even when the speed is constant. Recall, the acceleration vector is defined as the time derivative of the velocity vector (Equation 4.1.4). This means that if the velocity vector changes with time, then the acceleration vector is non-zero. If the length of the velocity vector (speed) is constant, it is still possible that the direction of the velocity vector changes with time, and thus, that the acceleration vector is non-zero. This is, for example, what happens when an object goes around in a circle with a constant speed (the direction of the velocity vector changes).
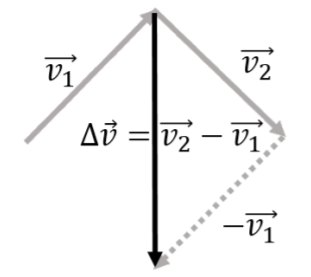
Figure 4.3.1 shows an illustration of a velocity vector, →v(t), at two different times, →v1 and →v2, as well as the vector difference, Δ→v=→v2−→v1, between the two. In this case, the length of the velocity vector did not change with time (||→v1||=||→v2||). The acceleration vector is given by:
→a=limΔt→0Δ→vΔt
and will have a direction parallel to Δ→v, and a magnitude that is proportional to Δv. Thus, even if the velocity vector does not change amplitude (speed is constant), the acceleration vector can be non-zero if the velocity vector changes direction.
Let us write the velocity vector, →v, in terms of its magnitude, v, and a unit vector, ˆv, in the direction of →v:
→v=vxˆx+vyˆy=vˆvv=||→v||=√v2x+v2yˆv=vxvˆx+vyvˆy
In the most general case, both the magnitude of the velocity and its direction can change with time. That is, both the direction and the magnitude of the velocity vector are functions of time:
→v(t)=v(t)ˆv(t)
When we take the time derivative of →v(t) to obtain the acceleration vector, we need to take the derivative of a product of two functions of time, v(t) and ˆv(t). Using the rules for taking the derivative of a product, the acceleration vector is given by:
→a=ddt→v(t)=ddtv(t)ˆv(t)
→a=dvdtˆv(t)+v(t)dˆvdt
and has two terms. The first term, dvdtˆv(t), is zero if the speed is constant (dvdt=0). The second term, v(t)dˆvdt, is zero if the direction of the velocity vector is constant (dˆvdt=0). In general though, the acceleration vector has two terms corresponding to the change in speed, and to the change in the direction of the velocity, respectively.
The specific functional form of the acceleration vector will depend on the path being taken by the object. If we consider the case where speed is constant, then we have:
v(t)=vdvdt=0v2x(t)+v2y(t)=v2∴
In other words, if the magnitude of the velocity is constant, then the x and y components are no longer independent (if the x component gets larger, then the y component must get smaller so that the total magnitude remains unchanged). If the speed is constant, then the acceleration vector is given by:
\begin{aligned} \vec a&=\frac{dv}{dt}\hat v(t)+v\frac{d\hat v}{dt}\nonumber\\[4pt] &=0 + v\frac{d}{dt}\hat v(t)\nonumber\\[4pt] &=v\frac{d}{dt}\left(\frac{v_x(t)}{v}\hat x+\frac{v_y(t)}{v}\hat y )\right)\nonumber\\[4pt] &=\frac{dv_x}{dt}\hat x + \frac{d}{dt}\sqrt{v^2-v_x(t)^2}\hat y\nonumber\\[4pt] &=\frac{dv_x}{dt}\hat x + \frac{1}{2\sqrt{v^2-v_x(t)^2}}(-2v_x(t))\frac{dv_x}{dt}\hat y\nonumber\\[4pt] &=\frac{dv_x}{dt}\hat x - \frac{v_x(t)}{\sqrt{v^2-v_x(t)^2}}\frac{dv_x}{dt}\hat y\nonumber\\[4pt] &=\frac{dv_x}{dt}\hat x - \frac{v_x(t)}{v_y(t)}\frac{dv_x}{dt}\hat y\nonumber \end{aligned}
\vec a=\frac{dv_{x}}{dt}\left( \hat x - \frac{v_{x}(t)}{v_{y}(t)}\hat y \right)
where most of the algebra that we did was to separate the x and y components of the acceleration vector, and we used the Chain Rule to take the derivative of the square root. The resulting acceleration vector is illustrated in Figure \PageIndex{2} along with the velocity vector1.
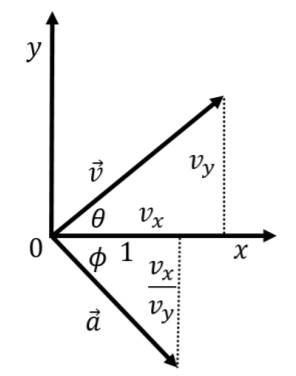
The velocity vector has components v_x and v_y, which allows us to calculate the angle, \theta that it makes with the x axis:
\begin{aligned} \tan(\theta)=\frac{v_y}{v_x}\end{aligned}
Similarly, the vector that is parallel to the acceleration has components of 1 and -\frac{v_x}{v_y}, allowing us to determine the angle, \phi, that it makes with the x axis:
\begin{aligned} \tan(\phi)=\frac{v_x}{v_y}\end{aligned}
Note that \tan(\theta) is the inverse of \tan(\phi), or in other words, \tan(\theta)=\cot(\phi), meaning that \theta and \phi are complementary and thus must sum to \frac{\pi}{2} (90). This means that the acceleration vector is perpendicular to the velocity vector if the speed is constant and the direction of the velocity changes.
In other words, when we write the acceleration vector, we can identify two components, \vec a_{\parallel}(t) and \vec a_{\perp}(t):
\begin{aligned} \vec a&=\frac{dv}{dt}\hat v(t)+v(t)\frac{d\hat v}{dt}\\[4pt] &=\vec a_{\parallel}(t) + \vec a_{\perp}(t)\\[4pt] \therefore \vec a_{\parallel}(t)&=\frac{dv}{dt}\hat v(t)\\[4pt] \therefore \vec a_{\perp}(t)&=v\frac{d\hat v}{dt}=\frac{dv_x}{dt} \left(\hat x - \frac{v_x(t)}{v_y(t)}\hat y\right)\end{aligned}
where \vec a_{\parallel}(t) is the component of the acceleration that is parallel to the velocity vector, and is responsible for changing its magnitude, and \vec a_{\perp}(t), is the component that is perpendicular to the velocity vector and is responsible for changing the direction of the motion.
A satellite moves in a circular orbit around the Earth with a constant speed. What can you say about its acceleration vector?
- It has a magnitude of zero.
- It is perpendicular to the velocity vector.
- It is parallel to the velocity vector.
- It is in a direction other than parallel or perpendicular to the velocity vector.
- Answer
- B. If the speed does not change, the acceleration cannot act in the same direction as the motion.
Footnotes
1. Rather, it is a vector parallel to the acceleration vector that is illustrated, as the factor of \frac{dv_{x}}{dt} was omitted (as you recall, multiplying by a scalar only changes the length, not the direction)