
24A: Work and Energy



- Last updated
- Jan 16, 2023
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
You have done quite a bit of problem solving using energy concepts. Back in chapter 2 we defined energy as a transferable physical quantity that an object can be said to have and we said that if one transfers energy to a material particle that is initially at rest, that particle acquires a speed which is an indicator of how much energy was transferred. We said that an object can have energy because it is moving (kinetic energy), or due to its position relative to some other object (potential energy). We said that energy has units of joules. You have dealt with translational kinetic energy K=12mv2, rotational kinetic energy K=12Iω2, spring potential energy U=12kx2, near-earth’s-surface gravitational potential energy U=mgy, and the universal gravitational potential energy U=−Gm1m2r corresponding to the Universal Law of Gravitation. The principle of the conservation of energy is, in the opinion of this author, the central most important concept in physics. Indeed, at least one dictionary defines physics as the study of energy. It is important because it is conserved and the principle of conservation of energy allows us to use simple accounting procedures to make predictions about the outcomes of physical processes that have yet to occur and to understand processes that have already occurred. According to the principle of conservation of energy, any change in the total amount of energy of a system can be accounted for in terms of energy transferred from the immediate surroundings to the system or to the immediate surroundings from the system. Physicists recognize two categories of energy transfer processes. One is called work and the other is called heat flow. In this chapter we focus our attention on work.
Conceptually, positive work is what you are doing on an object when you push or pull on it in the same direction in which the object is moving. You do negative work on an object when you push or pull on it in the direction opposite the direction in which the object is going. The mnemonic for remembering the definition of work that helps you remember how to calculate it is “Work is Force times Distance.” The mnemonic does not tell the whole story. It is good for the case of a constant force acting on an object that moves on a straight line path when the force is in the same exact direction as the direction of motion.
A more general, but still not completely general, “how-to-calculate-it” definition of work applies to the case of a constant force acting on an object that moves along a straight line path (when the force is not necessarily directed along the path). In such a case, the work W done on the object, when it travels a certain distance along the path, is: the along-the-path component of the force F∥ times the length of the path segment △r.
W=F∥△r
Even this case still needs some additional clarification: If the force component vector along the path is in the same direction as the object’s displacement vector, then F∥ is positive, so the work is positive; but if the force component vector along the path is in the opposite direction to that of the object’s displacement vector, then F∥ is negative, so the work is negative. Thus, if you are pushing or pulling on an object in a direction that would tend to make it speed up, you are doing positive work on the object. But if you are pushing or pulling on an object in a direction that would tend to slow it down, you are doing negative work on the object.
In the most general case in which the “component of the force along the path” is continually changing because the force is continually changing (such as in the case of an object on the end of a spring) or because the path is not straight, our “how-to-calculate-it” definition of the work becomes: For each infinitesimal path segment making up the path in question, we take the product of the along-the-path force component and the infinitesimal length of the path segment. The work is the sum of all such products. Such a sum would have an infinite number of terms. We refer to such a sum as an integral.
The Relation Between Work and Motion
Let’s go back to the simplest case, the case in which a force →F is the only force acting on a particle of mass m which moves a distance △r (while the force is acting on it) in a straight line in the exact same direction as the force. The plan here is to investigate the connection between the work on the particle and the motion of the particle. We’ll start with Newton’s 2nd Law.
Free Body Diagram
a→=1mF→
a=1mF
Solving for F, we arrive at:
F=ma
On the left, we have the magnitude of the force. If we multiply that by the distance △r, we get the work done by the force on the particle as it moves the distance △r along the path, in the same direction as the force. If we multiply the left side of the equation by △r then we have to multiply the right by the same thing to maintain the equality.
F△r=ma△r
On the left we have the work W, so:
W=ma△r
On the right we have two quantities used to characterize the motion of a particle so we have certainly met our goal of relating work to motion, but we can untangle things on the right a bit if we recognize that, since we have a constant force, we must have a constant acceleration. This means the constant acceleration equations apply, in particular, the one that (in terms of r rather than x) reads:
v2=v20+2a△r
Solving this for a△r gives
a△r=12v2−12v2∘
Substituting this into our expression for W above (the one that reads W=ma△r ) we obtain
W=m(12v2−12v2∘)
which can be written as
W=12mv2−12mv2∘
Of course we recognize the 12mv20 as the kinetic energy of the particle before the work is done on the particle and the 12mv2 as the kinetic energy of the particle after the work is done on it. To be consistent with the notation we used in our early discussion of the conservation of mechanical energy we change to the notation in which the prime symbol ( ′ ) signifies “after” and no super- or subscript at all (rather than the subscript “o”) represents “before.” Using this notation and the definition of kinetic energy, our expression for W becomes:
W=K′−K
Since the “after” kinetic energy minus the “before” kinetic energy is just the change in kinetic energy δK, we can write the expression for W as:
W=δK
This is indeed a simple relation between work and motion. The cause, work on a particle, on the left, is exactly equal to the effect, a change in the kinetic energy of the particle. This result is so important that we give it a name, it is the Work-Energy Relation. It also goes by the name: The Work-Energy Principle. It works for extended rigid bodies as well. In the case of a rigid body that rotates, it is the displacement of the point of application of the force, along the path of said point of application, that is used (as the δr) in calculating the work done on the object. In the expression W=δK, the work is the net work (the total work) done by all the forces acting on the particle or rigid body. The net work can be calculated by finding the work done by each force and adding the results, or by finding the net force and using it in the definition of the work.
Calculating the Work as the Force-Along-the-Path Times the Length of the Path
Consider a block on a flat frictionless incline that makes an angle θ with the vertical. The block travels from a point A near the top of the incline to a point B, a distance d in the down-theincline direction from A. Find the work done, by the gravitational force, on the block.
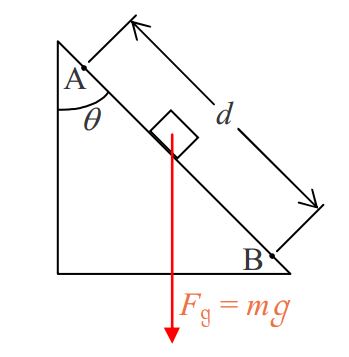
We’ve drawn a sketch of the situation (not a free body diagram). We note that the force for which we are supposed to calculate the work is not along the path. So, we define a coordinate system with one axis in the down-the-incline direction and the other perpendicular to that axis
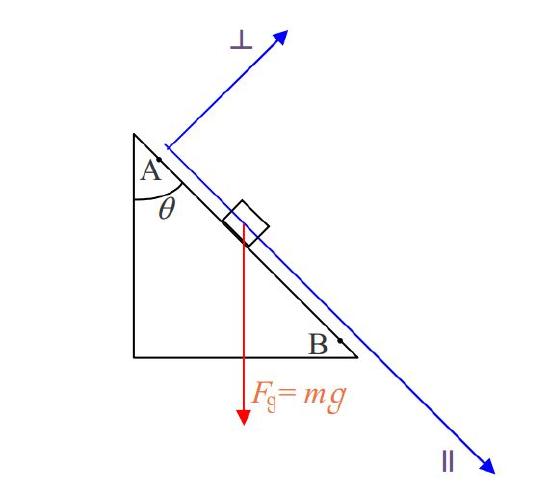
and break the gravitational force vector up into its components with respect to that coordinate system.
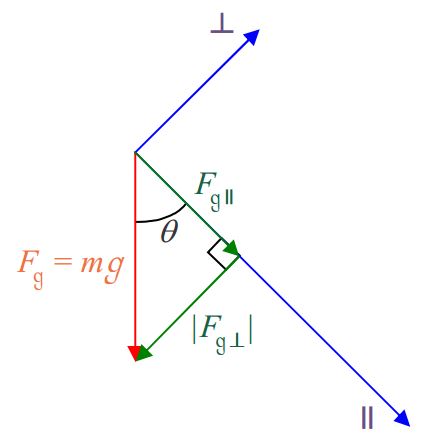
Fg∥=Fgcosθ=mgcosθ
|Fg⊥|=Fgsinθ=mgsinθ
Now we redraw the sketch with the gravitational force replaced by its components:
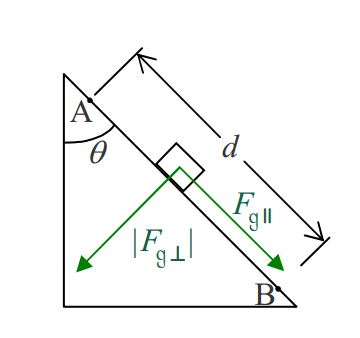
Fg⊥, being perpendicular to the path does no work on the block as the block moves from A to B. The work done by the gravitational force is given by
W=F∥d
W=Fg∥d
W=mg(cosθ)d
W=mgdcosθ
While this method for calculating the work done by a force is perfectly valid, there is an easier way. It involves another product operator for vectors (besides the cross product), called the dot product. To use it, we need to recognize that the length of the path, combined with the direction of motion, is none other than the displacement vector (for the point of application of the force). Then we just need to find the dot product of the force vector and the displacement vector.