
5.8: Rolling and Slipping Motion




- Last updated
- Apr 24, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
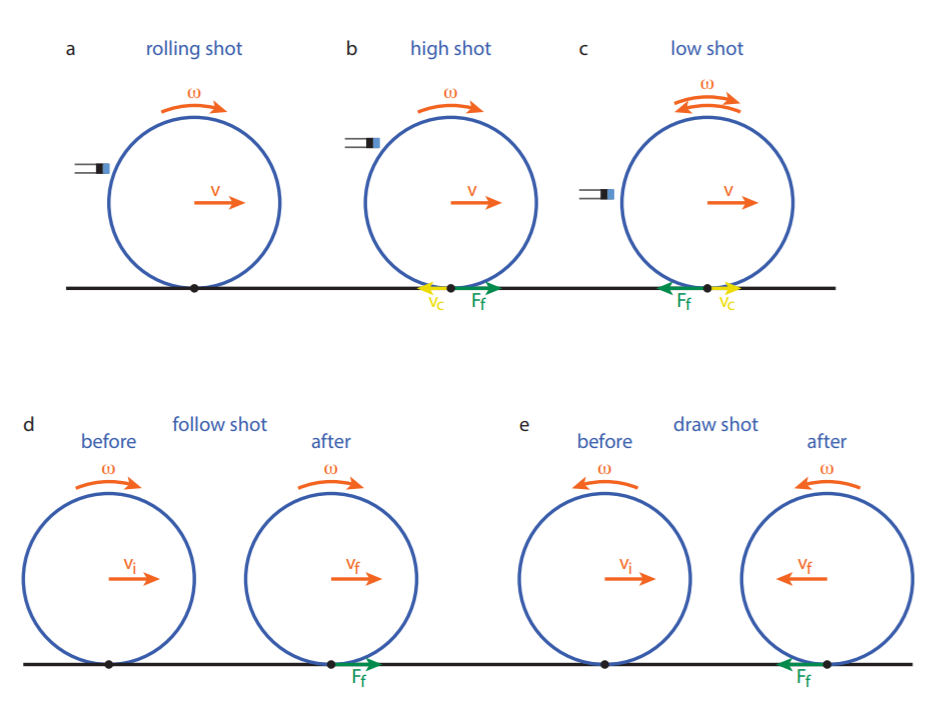
When you slide an object over a surface (say, a book over a table), it will typically slow down quickly, due to frictional forces. When you do the same with a round object, like a water bottle, it may initially slide a little (especially if you push it hard), but will quickly start to rotate. You can easily check that when rotating, the object loses much less kinetic energy to work than when sliding - take the same water bottle, either on its bottom (sliding only) or on its side (a little sliding plus rolling), push it with the same initial force, and let go: the rolling bottle gets much further. However, somewhat ironically, the bottle can only roll thanks to friction. To start rolling, it needs to change its angular momentum, which requires a torque, which is provided by the frictional force acting on the bottle.
When a bottle (or ball, or any round object) rolls, the instantaneous speed of the point touching the surface over which it rolls is zero. Consequently, its rotational speed ω and the translational speed of its center of rotation vr (where the r subscript is to indicate rolling) are related by vr=ωR, with R the relevant radius of our object. If the object’s center of rotation moves faster than vr, the rotation can’t ‘keep up’, and the object slides over the surface. We call this type of motion slipping. Due to friction, objects undergoing slipping motion typically quickly slow down to vr, at which point they roll without slipping.
Suppose we started our object with a velocity v0. If there is no rotation, the only force changing its velocity is the constant frictional force
Ffriction=μkFN=μkmg
with m the mass of the object (Equation 2.2.7). The constant force results in a linear decrease in the translational speed (see Section 2.3): v(t)=v0−μkgt. However, if our object can roll, there is a second contribution to the motion, due to the torque τfriction=FfrictionR of the frictional force. Using the rotational analog of Newton’s second law, Equation 5.4.1 (or writing L=Iω and using Equation 5.7.1), we get an equation of motion for the rotational velocity:
Iα=Idωdt=τ friction =F friction R
Integrating Equation ??? with initial condition ω(t=0)=0 we get ω(t)=μkmgRtI. While the object undergoes slipping motion, the translational speed thus linearly decreases with time, whereas the rotational speed linearly increases. To find the time and velocity at which the object enters a purely rolling motion, we simply equate v(t) with ω(t)R, which gives
tr=v0μkg(1+mR2I)
vr=v01+ImR2
Note that the time tr until fully rolling motion is achieved scales inversely with the friction coefficient, but the final rolling speed vr is independent of the frictional force. The rolling speed does depend on the moment of inertia of your object - for a hollow cylinder it’s vr=12v0, whereas for a solid cylinder it’s vr=23v0. Once the object is rolling, its surface no longer moves with respect to the surface that it’s rolling on (as its instantaneous speed at the point of touching is zero). Consequently, the frictional force is much reduced, and the object can roll a large distance before it stops; in fact, the main force slowing it down once it is rolling is drag with the ambient air, which we could safely ignore when (kinetic) friction was still in the picture.
5.8.1 Worked Example: A Cylinder Rolling Down a Slope
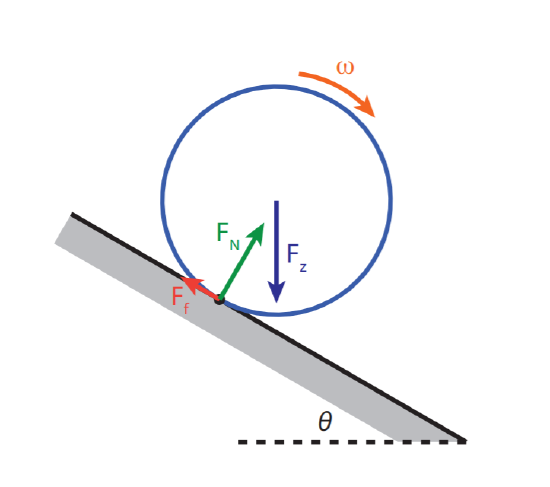
A massive cylinder with mass m and radius R rolls without slipping down a plane inclined at an angle θ. The coefficient of (static) friction between the cylinder and the plane is μ. Find the linear acceleration of the cylinder.
Solution
There are at least three ways to tackle this problem. For all three, it helps (as always) to make a sketch, indicating the relevant forces - see Figure 5.8.2.
- Method 1: Forces and torques.
Let the friction force Ff be positive in the direction up the plane. Then we have:
F=ma⇒mgsinθ−Ff=maτ=Iα⇒FfR=12mR2α no slipping ⇒a=αR
The last two equations give Ff=12ma. Plugging this into the first equation gives
a=gsinθ1+12=23gsinθ
- Method 2: Energy.
The total energy of the system is given by
Etot=K+V=12mv2+12Iω2+mgh
If the cylinder rolls down the slope without slipping, its angular and linear velocities are related through v=ωR. Also, if it moves a distance Δx, its height decreases by Δx⋅sinθ. Conservation of energy then gives:
0=dEtotdt=ddt[12mv2+12I(vR)2−mgxsinθ]=mv˙v+Iv˙vR2−mgvsinθ=[a+12a−gsinθ]mv
where we used I=12mR2 for a massive cylinder in the last line. The linear acceleration a is thus given by a=23gsinθ.
- Method 3: Rotational version of Newton’s second law.
At a given point in time, we can apply the rotational version of Newton’s second law to rotations about the point where the cylinder touches the surface (as the cylinder is rolling without slipping, this is the only motion at that point). Of the three forces in the system, two act at that point, so they have no lever arm. Only gravity has a nonzero lever arm of length Rsinθ, leading to a torque given by τz=mgRsinθ. By the rotational version of Newton’s second law, we have τ=Iα, where I is the moment of inertia about the pivot. Applying the parallel-axis theorem, we find I=Icm+md2=32mR2 in this case, so we get an angular acceleration of
α=τzI=mgRsinθ32mR2=2g3Rsinθ
The linear acceleration of the center of the cylinder due to the ‘rotation’ about this pivot is given by a=Rα=23gsinθ.