
9A: One-Dimensional Motion Graphs
- Page ID
- 2462

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Consider an object undergoing motion along a straight-line path, where the motion is characterized by a few consecutive time intervals during each of which the acceleration is constant but typically at a different constant value than it is for the adjacent specified time intervals. The acceleration undergoes abrupt changes in value at the end of each specified time interval. The abrupt change leads to a jump discontinuity in the Acceleration vs. Time Graph and a discontinuity in the slope (but not in the value) of the Velocity vs. Time Graph (thus, there is a “corner” or a “kink” in the trace of the Velocity vs. Time graph). The thing is, the trace of the Position vs. Time graph extends smoothly through those instants of time at which the acceleration changes. Even folks that get quite proficient at generating the graphs have a tendency to erroneously include a kink in the Position vs. Time graph at a point on the graph corresponding to an instant when the acceleration undergoes an abrupt change.
Your goals here all pertain to the motion of an object that moves along a straight line path at a constant acceleration during each of several time intervals but with an abrupt change in the value of the acceleration at the end of each time interval (except for the last one) to the new value of acceleration that pertains to the next time interval. Your goals for such motion are:
- Given a description (in words) of the motion of the object; produce a graph of position vs. time, a graph of velocity vs. time, and a graph of acceleration vs. time, for that motion.
- Given a graph of velocity vs. time, and the initial position of the object; produce a description of the motion, produce a graph of position vs. time, and produce a graph of acceleration vs. time.
- Given a graph of acceleration vs. time, the initial position of the object, and the initial velocity of the object; produce a description of the motion, produce a graph of position vs. time, and produce a graph of velocity vs. time.
The following example is provided to more clearly communicate what is expected of you and what you have to do to meet those expectations:
A car moves along a straight stretch of road upon which a start line has been painted. At the start of observations, the car is already \(225 m\) ahead of the start line and is moving forward at a steady \(15 m/s\). The car continues to move forward at \(15 m/s\) for \(5.0\) seconds. Then it begins to speed up. It speeds up steadily, obtaining a speed of \(35 m/s\) after another \(5.0\) seconds. As soon as its speed gets up to \(35 m/s\), the car begins to slow down. It slows steadily, coming to rest after another \(10.0\) seconds. Sketch the graphs of position vs. time, velocity vs. time, and acceleration vs. time pertaining to the motion of the car during the period of time addressed in the description of the motion. Label the key values on your graphs of velocity vs. time and acceleration vs. time. Solution
Okay, we are asked to draw three graphs, each of which has the time, the same “stopwatch readings” plotted along the horizontal axis. The first thing I do is to ask myself whether the plotted lines/curves are going to extend both above and below the time axis. This helps to determine how long to draw the axes. Reading the description of motion in the case at hand, it is evident that:
- The car goes forward of the start line but it never goes behind the start line. So, the \(x\) vs. \(t\) graph will extend above the time axis (positive values of \(x\)) but not below it (negative values of \(x\)).
- The car does take on positive values of velocity, but it never backs up, that is, it never takes on negative values of velocity. So, the \(v\) vs. \(t\) graph will extend above the time axis but not below it.
- The car speeds up while it is moving forward (positive acceleration), and it slows down while it is moving forward (negative acceleration). So, the \(a\) vs. \(t\) graph will extend both above and below the time axis.
Next, I draw the axes, first for \(x\) vs. \(t\), then directly below that set of axes, the axes for \(v\) vs. \(t\), and finally, directly below that, the axes for \(a\) vs. \(t\). Then I label the axes, both with the symbol used to represent the physical quantity being plotted along the axis and, in brackets, the units for that quantity.
Now I need to put some tick marks on the time axis. To do so, I have to go back to the question to find the relevant time intervals. I’ve already read the question twice and I’m getting tired of reading it over and over again. This time I’ll take some notes:

From my notes it is evident that the times run from \(0\) to \(20\) seconds and that labeling every \(5\) seconds would be convenient. So I put four tick marks on the time axis of \(x\) vs. \(t\). I label the origin \(0\), \(0\) and label the tick marks on the time axis \(5\), \(10\), \(15\), and \(20\) respectively. Then I draw vertical dotted lines, extending my time axis tick marks up and down the page through all the graphs. They all share the same times and this helps me ensure that the graphs relate properly to each other. In the following diagram we have the axes and the graph. Except for the labeling of key values I have described my work in a series of notes. To follow my work, please read the numbered notes, in order, from \(1\) to \(10\).
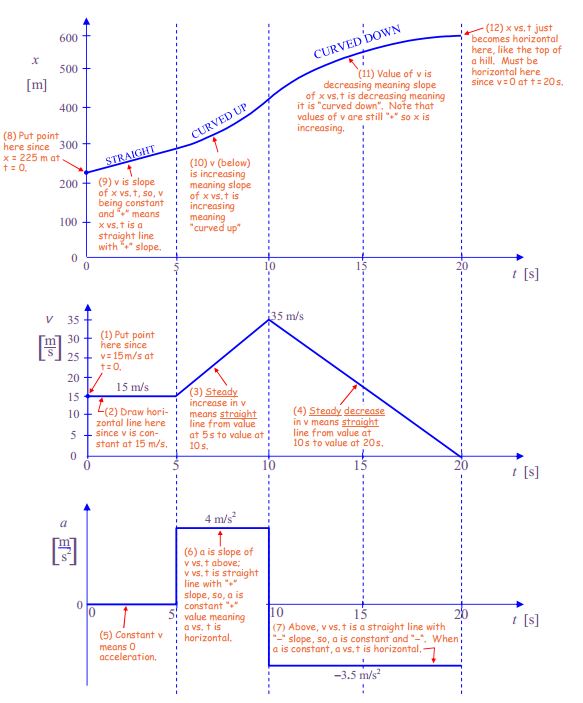
The key values on the \(v\) vs. \(t\) graph are givens so the only “mystery,” about the diagram above, that remains is, “How were the key values on \(a\) vs. \(t\) obtained?” Here are the answers:
On the time interval from \(t=5\) seconds to \(t=10\) seconds, the velocity changes from \(15\dfrac{m}{s}\) to \(35\dfrac{m}{s}\). Thus, on that time interval the acceleration is given by:
\[a=\dfrac{\triangle v}{\triangle t}=\dfrac{v_f-v_i}{t_f-t_i}=\dfrac{35\dfrac{m}{s}-15\dfrac{m}{s}}{10s-5s}=4\dfrac{m}{s^2} \nonumber \]
On the time interval from \(t=10\) seconds to \(t=20\) seconds, the velocity changes from \(35\dfrac{m}{s}\) to \(0\dfrac{m}{s}\). Thus, on that time interval the acceleration is given by:
\[a=\dfrac{\triangle v}{\triangle t}=\dfrac{v_f-v_i}{t_f-t_i}=\dfrac{0\dfrac{m}{s}-35\dfrac{m}{s}}{20s-10s}=-3.5\dfrac{m}{s^2} \nonumber \]