
4.4: Rocket Science
- Page ID
- 17385

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Although designing a rocket that will follow a desired trajectory (say to Ceres, Pluto, or Planet Nine) with great accuracy is an enormous engineering challenge, the basic principle behind rocket propulsion is remarkably simple. It essentially boils down to conservation of momentum, or, equivalently, the observation that the velocity of center of mass of a system does not change if no external forces are acting on the system. To understand how a rocket works, imagine1 the following experiment: you sit on a initially stationary cart with a large amount of small balls. You then pick up the balls one by one, and throw them all in the same direction with the same (preferably high) speed (relative to yourself and thus the cart). What will happen is that you,the cart, and the remaining balls slowly pick up speed, in the opposite direction from the one you’re throwing the balls in. This is exactly what a rocket engine does: it thrusts out small particles (molecules, actually) at high velocities, gaining a small velocity itself in the opposite direction. Note that this is completely different from most other engines, which drive the rotation of wheels (that depend on friction to work) or propellers(that depend on drag to work).
Rocket Equation
To understand what happens in our thought experiment, let’s first consider the first ball you throw. Let’s call the mass of yourself plus the cart M, the total mass of the balls m, and the (small) mass of a single ball dm. If you trow the ball with a speed u (with respect to yourself ), we can calculate your resulting speed in two ways:
- The center of mass must remain stationary. Let’s putxcm∆0. Before the throw, we then have \(x_{\text { ball }} \mathrm{d} m+ x_{\mathrm{car}}(M+m)=0\), whereas after the throw we have \(-u t \mathrm{d} m+v_{\mathrm{car}} t(M+m)=0, \text { or } v_{\mathrm{car}}=\frac{-u \mathrm{d} m}{(M+m)}\).
- The total momentum must be conserved. Before the throw, the total momentum is zero, as nothing is moving. After the throw, we get: \(p_{\text { ball }}+p_{\text { car }}=-u \mathrm{d} m+\nu_{\text { car }}(M+m)\). Equating this to zero again gives \(v_{\mathrm{car}}=\frac{-u \mathrm{d} m}{(M+m)}\).
Now for the second, third, etc. ball, the situation gets more complicated, as the car (including the ball that is about to be thrown) is already moving. Naturally, the center of mass of the car plus all the balls remains fixed,as does the total momentum of the car plus all the balls. However, to calculate how much extra speed the car picks up from the nth ball, it is easier to not consider the balls already thrown. Instead, we consider a car(including the remaining balls) that is already moving at speed v, and thus has total momentum (M≈m)v.Throwing the next ball will reduce the mass of the car plus balls by dm, and increase its velocity by dv.Conservation of momentum then gives:
\[(M+m) v=(M+m-\mathrm{d} m)(\nu+\mathrm{d} v)+(v-u) \mathrm{d} m=(M+m) v+(M+m) \mathrm{d} v-u \mathrm{d} m \label{ballthrow}\]
where we dropped the second-order term dmdv. Equation (\ref{ballthrow}) can be rewritten to
\[(M+m) \mathrm{d} v=u \mathrm{d} m \label{simple}\]
Note that here both u (the speed of each thrown ball) and M (the mass of yourself plus the car, or the shell of a rocket) are constants, whereas m changes, ending up at zero when you’ve thrown all your balls. To find the velocity of our car, we can integrate Equation (\ref{simple}), but there is an important, and rather subtle, point to consider. The left-hand side of Equation (\ref{simple}) applies to the car, but the right-hand side to the thrown ball, with a (positive) mass dm. The mass m of the balls remaining in the car, however, has decreased by dm,so if we wish to know the final velocity of the car, we need to include a minus sign on the right-hand side of Equation (\ref{simple}). Dividing through by M+m and integrating, we then obtain:
\[\Delta v=v_{\mathrm{f}}-v_{0}=u \log \left(\frac{M+m_{0}}{M}\right) \label{tsiolkovsky}\]
where \(v_f\) is the final velocity of the car, and \(m_0\) the initial total mass of all the balls. Equation (\ref{tsiolkovsky}) is known as the Tsiolkovsky rocket equation2.
Konstantin Eduardovich Tsiolkovsky
Konstantin Eduardovich Tsiolkovsky (1857-1935) was a Russian rocket scientist, who is considered to be one of the pioneers of cosmonautics.Self-taught, Tsiolkovsky became interested in spaceflight both through‘cosmic’ philosopher Nikolai Fyodorov and science-fiction author Jules Verne and considered the construction of a space elevator inspired by the then newly built Eiffel tower in Paris. Working as a teacher, he spent much of his free time on research, developing the rocket equation named after him (Equation \ref{tsiolkovsky}) as well as developing designs for rockets, including multi-stage ones. Tsiolkovsky also worked on designing airplanes and air-ships (dirigibles), but did not get support from the authorities to develop these further. He kept working on rockets though, while also continuing as a mathematics teacher. Only late in life did he receive recognition for his work at home (then the Soviet Union), but his ideas would go on to influence other rocket pioneers in both the Soviet and American space programs.
Multi-Stage Rockets
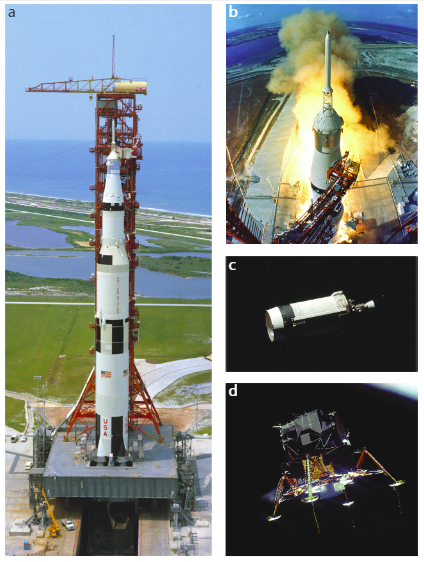
Because of the logarithmic factor in the Tsiolkovsky rocket equation, rockets need a lot of fuel compared to the mass of the object they intend to deliver (the payload - say a probe, or a capsule with astronauts). Even so, the effectiveness of rockets is limited. A fuel to payload ratio of 9:1 (already quite high) and an initial speed of zero gives a final speed \(v_{\mathrm{f}}=u \log (10) \simeq 2.3 u\), and increasing the ratio to 99:1 only doubles this result: \(v_{\mathrm{f}}=u \log (100) \simeq 4.6 u\). To get around these limitations and give rockets (or rather their payloads) the speed necessary to leave Earth, or even the solar system, rockets are built with multiple stages - essentially a number of rockets stacked one upon the next. If these stages all have the same fuel to payload ratio and exhaust velocity, the final velocity of the payload simply is that of a single stage times the number of stages n: \(v_{\mathrm{f}}=n u \log \left(1+\frac{m_{0}}{M}\right) \). To see this, consider that the remaining stages are the payload of the current stage. Having multiple stages thus allows rockets to pick up speed more efficiently, essentially by shedding a part oft he ‘payload’ (casing of an empty stage). For example, the Saturn V rocket that was used to send the Apollo astronauts to the moon had three stages, plus a small rocket engine on the capsule itself (used to break moon orbit and send the astronauts back to Earth), see Figure 4.4.2.
Impulse
When you’re crashing into something, there are two factors that determine how much your momentum changes: the amount of force acting on you, and the time the force is acting. The product is known as the impulse, which by Newton’s second law equals the change in momentum:
\[J=\Delta p=\int F(t) \mathrm{d} t\]
The specific impulse, defined as \(I_{sp}=\frac{J}{m_{propellant}}\), or the impulse per unit mass of fuel, is a measure of the efficiency of jet engines and rockets.
1 Or carry out, as you please.
2 Though Tsiolkovsky certainly deserves credit for his pioneering work, and he likely derived the equation independently, he was not the first to do so. Both the British mathematician William Moore in 1813 and the Scottish minister and mathematician William Leitch in 1861 preceded him.