
7.E: General Rotational Motion (Exercises)




- Last updated
- Dec 30, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
7.1 Two Delft students wish to re-create Galilei’s experiment dropping objects with different mass from a high tower. They use the tower of the Old Church in Delft, which, like the more famous one in Pisa supposedly used by Galilei, leans over somewhat. The tip of the tower is 75 m above street level, and 2.0 m removed from the vertical. The student who will drop the objects stands on the trans at 60 m. The base of the tower is a square of 10×10 m.
- How far from the base of the tower do you expect the stone to fall?
- The second student, who has done the same calculation you did in (a), has put a camera close to the floor aimed at the spot where the objects will drop. Surprisingly, in a test drop of a single stone, he observes that the actual position the stone hits the ground deviates from this spot. The student at the top however insists that she dropped the stone straight down from the tower trans, as agreed. The students therefore go back to their Mechanics books and realize that they forgot to account for the rotation of the Earth. Which of the (fictional) forces described in this section could cause the stone to deviate from its straight path down?
- Delft is located on the Northern hemisphere. In which direction will the trajectory of the stone be deflected?
- Delft is at 52.0∘N. What is the magnitude of the deflection of the dropped stone on the ground? You may neglect air resistance in this calculation.
7.2 Foucault’s pendulum A well-known (and conclusive) proof of the fact that the Earth is rotating is provided by a Foucault pendulum, first presented by French physicist Léon Foucault in 1851 (a replica of his device is on permanent exhibit in the Panthéon in Paris, as well as in many other science musea around the world, see Figure 7.E.1). A key part of this pendulum is the way its pivot is constructed: it has to be rotationally symmetric and frictionless, so it can’t exert any torques on the pendulum itself. Consequently, the plane in which the pendulum oscillates will remain unchanged2, even as the Earth rotates. Therefore, for observers on Earth, the plane of the pendulum seems to rotate over time. To see how this works, consider putting this pendulum at the North pole. Then for an external observer, the plane of the pendulum stays fixed (there are no forces acting on it), while the Earth (looking down on the North pole) rotates counterclockwise; for an Earth-bound observer, the pendulum’s plane thus seems to move clockwise (again as seen from the top), making one full revolution in one day.
Paris is not on the North pole, but it does lie on the Northern hemisphere, so the pendulum will still appear to rotate clockwise, just at a slower frequency. We’ll calculate this precession frequency in this problem.
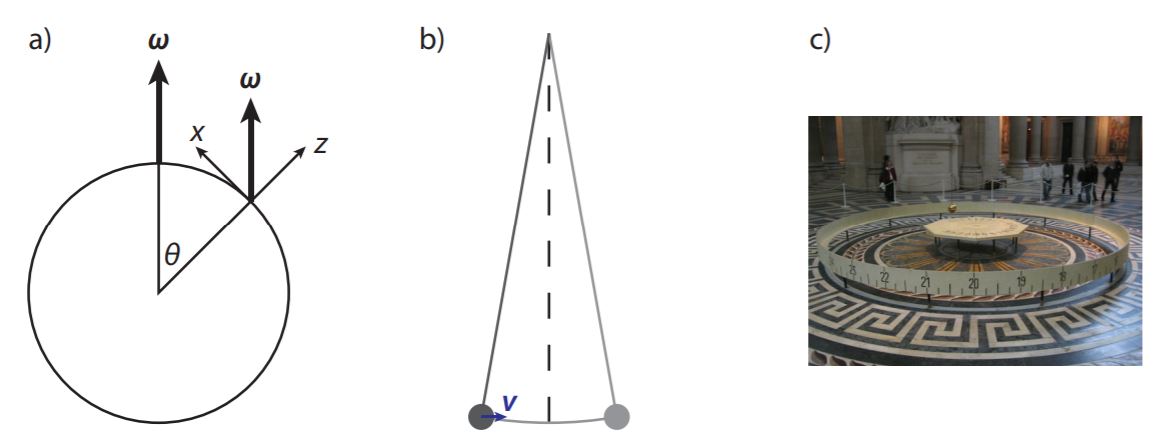
- First, we need the angular velocity in Paris, in a useful coordinate system. Define the ˆz axis as pointing upwards in Paris, and ˆx as the tangent to the planet due North (see Figure 7.E.1a). Express ω in these coordinates.
- If the pendulum has a very long string (the original Foucault one is 67 m) compared to its amplitude, the velocity v of the weight will be roughly in the horizontal direction, see Figure 7.E.1b. Argue why, in this case, the component of ω in the ˆx direction will not change the frequency at which the plane of the pendulum precesses.
- The pendulum’s plane rotates with a (precession) frequency ωP=ωPˆz with respect to the Earth’s frame fixed in Paris. This precession frequency must exactly compensate for the Earth’s rotation in the frame of the pendulum (as in that frame, there are no forces acting on the pendulum, and thus its plane of oscillation stays fixed). Show that these considerations imply that ωP=−ωcosθ.
- Suppose that you enter the Panthéon at noon, and mark the direction in which the pendulum is oscillating. When you return an hour later, by how much will this plane have rotated? Will this be enough to be visible by eye? The Panthéon is at 48∘50′46″N (note that degrees, like hours, are divided in (arc)minutes and seconds that run up to 60, not 100).
7.3 An alternative way to show the effect of the rotation of the Earth involves only a smooth horizontal plane and a particle that can slide over it. Show that if the particle’s velocity is v, its trajectory will be a circle with radius r=v2Ω, where Ω is the Earth’s rotational velocity.
7.4 The centrifugal force emerges in a rotating coordinate frame, and famously causes the parabolic shape of the surface of water in a rotating bucket. As the centrifugal force is always perpendicular to the rotation axis, we can pick coordinates such that the rotation axis coincides with the z-axis, ω=ωˆz, and we can express the centrifugal force in cylindrical coordinates as Fcf=mω2ρˆρ (Equation 7.2.11).
We now consider a small volume of water at the rotating surface (in steady-state). There are two forces acting on this mass of water: gravity (pointing down, as always) and the centrifugal force, pointing outward, see Figure 7.E.2. The resulting net force cannot have a component along the surface, as this would result in an acceleration of the water (and hence a water flow); therefore, the force must be perpendicular to the surface, and counterbalance the pressure in the water (just like it would for the flat surface of water in a bucket that is not rotating).
The gravitational and centrifugal force add up to what is known as an effective gravity, given by
geff=−gˆz+ω2ρˆρ
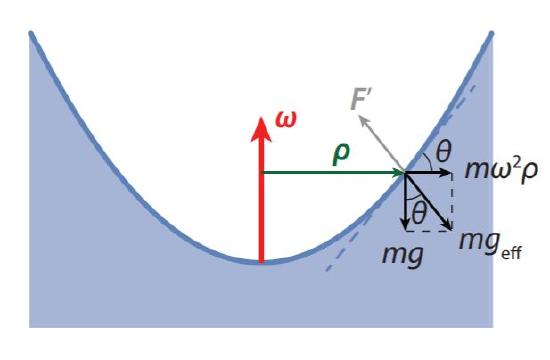
- Find the angle θ the direction of the effective gravitational force makes with the vertical (see Figure 7.E.2).
- If the gravitational force is to be perpendicular to the water surface, we must have dzdρ=tanθ Integrate this equation to find z(ρ) (and thus the shape of the surface).
- Find the potential energy corresponding to the effective gravitational force, Feff=mgeff.
- Argue why the potential energy must be constant on the water surface, and from this condition, again derive the shape of the water surface.