
8.E: Oscillations (Exercises)
- Page ID
- 17414

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)8.1
An object undergoes simple harmonic motion of amplitude \(A\) and angular frequency \(\omega\) about the equilibrium point \(x = 0\). Find the speed \(v\) of the object in terms of \(A, \omega\), and \(x\). Hint: use conservation of energy.
8.2
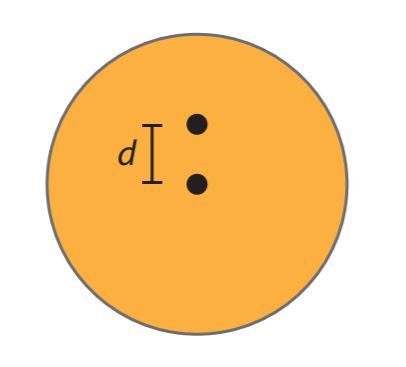
A disk of radius \(R\) and mass \(M\) is suspended from a pivot somewhere between its center and its edge, see figure below. For what pivot point (i.e., which distance \(d\)) will the period of this physical pendulum be a minimum (or equivalently the frequency a maximum)? You may find one of the theorems we proved in Chapter 5 useful in answering this question.
8.3
Figure 8.4 shows a common present-day seesaw design, also featured in Problem 2.10. In addition to a beam with two seats, this seesaw also contains two identical springs (with spring constant \(10 kN/m\)) that connect the beam to the ground. The distance between the pivot and each of the springs is \(30.0 cm\), the distance between the pivot and each of the seats is \(1.50 m\). Two children sit on the two seats. Both children kick off against the ground a couple of time, putting the seesaw in an oscillating motion with an amplitude of \(50.0 cm\). At \(t = 0\) the children stop kicking. The plot in figure c shows the height of one of the seats as a function of time afterwards.
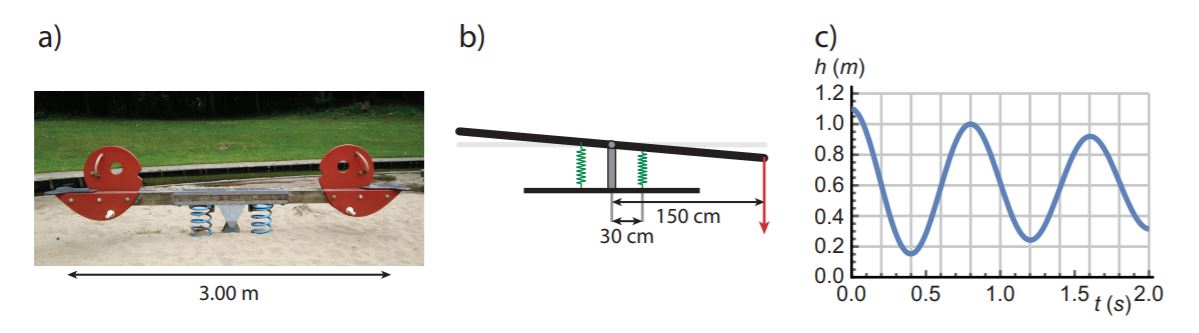
- In what type of motion is the seesaw after the children stop kicking?
- You could model the seesaw with the two children as a simple mass-on-a-spring, with a spring constant twice that of the individual spring in the seesaw. Using the graph in figure c, estimate the effective mass of this system.
- After a while, the children resume kicking, slowly bringing their amplitude back up to \(50.0 cm\). Using the mass-spring system of (b), estimate the amount of energy the children have to put in per period to achieve this.
8.4
A block with mass \(m_1 = 1.5 kg\) block is supported by a frictionless surface and attached to a horizontal spring of constant \(k = 22 N/m\), as shown in the figure. The block oscillates with an amplitude of \(10.0 cm\), executing a simple harmonic motion.
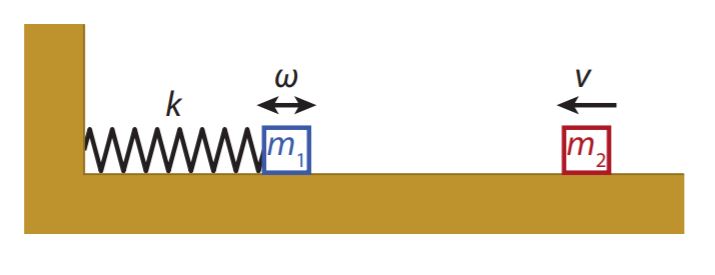
- Find the frequency \(\omega\) of the oscillation of the block.
- Write down the equation for the position of the block as a function of time, \(x(t)\), in such a form that it is at its rightmost position at \(t = 0\).
A second block of mass \(0.80 kg\) moves in from the right at \(2.5 m/s\) and hits the first block at \(t = 0\), i.e., when it is in its rightmost position. The two blocks then stick together and continue moving as one.
- Which quantity / quantities are conserved during the collision?
- Determine the frequency of the motion of the two blocks after the collision.
- Determine the amplitude of the motion of the two blocks after the collision.
8.5
Suppose you are stranded on an unknown planet with nothing but a physical pendulum and a stopwatch. You determined the properties of the pendulum back on Earth, and found \(m = 2.0 kg, h = 0.50 m\) and \(I = 3.0 kg \cdot m^2\). Having nothing better to do, you measure the time it takes your pendulum to complete 50 cycles, and find that this time equals \(170 s\). Use this information to compute the value of the gravitational acceleration \(g\) on your new home world.
8.6
For a damped harmonic oscillator driven by a sinusoidal force (as in Equation 8.3.1), find the average power dissipated per (driving) period. Hint: use \(P = F \cdot v\).
8.7
Consider a system of two coupled harmonic oscillators, where one (with mass \(2m\) and spring constant \(2k\)) is suspended from the ceiling, and the other (with mass \(m\) and spring constant \(k\)) is suspended from the first, as shown in the figure.
- Find the equation of motion of this system of coupled oscillators, and write it in matrix form. For each mass, use coordinates in which the zero is at the equilibrium position.
- Find the frequencies of the normal modes of this coupled system.