
9.4: Wave Superposition
- Page ID
- 17420

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The wave equation 9.2.6 is linear in the function we’re interested in, the displacement \(u(x,t)\). This simple mathematical statement has important consequences, because it means that if we know any set of solutions, we can create more solutions by making linear combinations of them - so if \(u_1 (x,t)\) and \(u_2 (x,t)\) are solutions, then so are \(au_1(x,t)+bu_2(x,t)\) for any choice of \(a\) and \(b\). In physics, this useful property of linear differential equations is known as the principle of superposition. Thanks to this principle, we can study how different waves interact with each other without having to do (much) extra math.
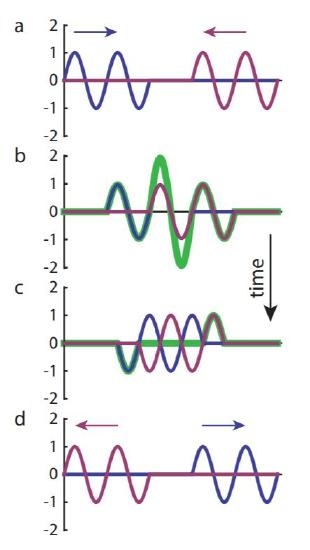
To illustrate, let us consider two one-dimensional waves traveling in opposite directions, Figure \(\PageIndex{1}\). As long as the waves do not overlap, the oscillation of any given particle is due to only one wave, and there is no interaction. However, as soon as the waves start overlapping, the oscillations add up, which leads to interference. At some points, the two oscillations will be in phase, resulting in a much larger oscillation amplitude, which we call constructive interference (Figure \(\PageIndex{1b}\)). At other points, the two oscillations will be out of phase, resulting in a much smaller, or even vanishing oscillation amplitude, which we call destructive interference (Figure \(\PageIndex{1c}\) ). However, the waves themselves remain unaffected, and transmit right through each other, continuing their path as if nothing had happened (Figure \(\PageIndex{1d}\) ).
Waves reaching the end of a string, or edge of a pond, or any type of boundary, will not simply disappear. Remember, waves carry energy, and that energy is conserved, so it has to go somewhere once the wave reaches the boundary. If there’s nothing at the boundary, the waves are reflected back into the material. This happens in two cases: a (perfectly) fixed boundary, and a (perfectly) free boundary; in other cases, some of the energy may be transmitted to material on the other side of the boundary (starting a new wave there), whereas the remainder is reflected back into the original material with less energy, resulting in a smaller wave amplitude. A reflected wave travels in the opposite direction to the original wave, so it can interfere with itself. In fact, this interference is a crucial point for being able to meet the boundary conditions. A fixed boundary cannot move, so there must be destructive interference keeping the amplitude there zero at all times - so it follows that a wave reflecting on a fixed boundary undergoes a \(\pi\) phase shift. Free boundaries on the other hand are perfectly free to move, so there is nothing holding it back from reaching the maximal displacement that can be achieved by constructive interference, and the wave reflects without a phase shift.
If you put boundaries on both ends of a string, the wave keeps reflecting back and forth, continuously interfering with itself. To find the resulting shape of the string, we’re going to use the principle of superposition for a simple sinusoidal wave. Let
\[u_{1}(x, t)=A \cos (k x-\omega t) \nonumber\]
be the part of the wave traveling to the right, and
\[u_{2}(x, t)=-A \cos (k x+\omega t) \nonumber\]
be the part traveling to the left. Note the differences: the waves have opposite signs for their speeds, and opposite signs for their displacements, the latter because of the \(π\) phase shift (we could also write \(u_{2}(x, t)=A \cos (k x+\omega t+\pi)\)). The shape of the string is now simply the sum of these two waves:
\[\begin{align} u(x, t) &=u_{1}(x, t)+u_{2}(x, t) \\[4pt] &=A[\cos (k x-\omega t)-\cos (k x+\omega t)] \\[4pt] &=2 A \sin (k x) \sin (\omega t) \label{9.16} \end{align}\]
Equation \ref{9.16} tells us that for a self-interfering wave, the wave no longer moves - instead, each point simply oscillates with frequency \(\omega\) at a position-dependent amplitude \(2A\sin(kx)\). We call such a wave a standing wave. Standing waves are very common - you’ll get one every time you’ll touch the string of a guitar or violin. Naturally, they are not restricted to one-dimensional systems - the skin of a drum, constrained at the drum’s edge, is put in a standing wave every time someone hits it.
Equation \ref{9.16} describes the shape of a standing wave on a string clamped at both ends. If the string has length \(L\), then by the nature of the boundary conditions, we must have \(u(0,t) = u(L,t) = 0\) for all \(t\). The first condition follows for free (which is of course just due to a good choice of coordinates), but the second puts a constraint on our wave. The displacement can only be zero at all times if the amplitude is identically zero, so we demand that
\[\sin(kL) = 0\]
or
\[L = \frac{m \pi}{k} = \dfrac{m \lambda}{2}\]
where \(m\) is any positive integer. There are thus infinitely many allowed standing waves, but they are characterized by a discrete number. The allowed waves are known as modes, and the associated number \(m\) is the mode number. The simplest wave, with the lowest possible value, \(m = 1\), is known as the fundamental mode. In the fundamental mode, the oscillation of the string has nonzero amplitude everywhere but at the fixed ends; for higher modes, there are also points in between that have zero amplitude, which are known as nodes; points where the amplitude is maximum are sometimes referred to as antinodes.
A discrete spectrum of allowed solutions, characterized by integer numbers, does not only appear in standing mechanical waves, but is also a fundamental aspect of quantum mechanics.