
5.8: Drawing Free-Body Diagrams


- Last updated
- Mar 16, 2025
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
- Explain the rules for drawing a free-body diagram
- Construct free-body diagrams for different situations
The first step in describing and analyzing most phenomena in physics involves the careful drawing of a free-body diagram. Free-body diagrams have been used in examples throughout this chapter. Remember that a free-body diagram must only include the external forces acting on the body of interest. Once we have drawn an accurate free-body diagram, we can apply Newton’s first law if the body is in equilibrium (balanced forces; that is, Fnet=0) or Newton’s second law if the body is accelerating (unbalanced force; that is, Fnet≠0).
In Forces, we gave a brief problem-solving strategy to help you understand free-body diagrams. Here, we add some details to the strategy that will help you in constructing these diagrams.
Observe the following rules when constructing a free-body diagram:
- Draw the object under consideration; it does not have to be artistic. At first, you may want to draw a circle around the object of interest to be sure you focus on labeling the forces acting on the object. If you are treating the object as a particle (no size or shape and no rotation), represent the object as a point. We often place this point at the origin of an xy-coordinate system.
- Include all forces that act on the object, representing these forces as vectors. Consider the types of forces described in Common Forces—normal force, friction, tension, and spring force—as well as weight and applied force. Do not include the net force on the object. With the exception of gravity, all of the forces we have discussed require direct contact with the object. However, forces that the object exerts on its environment must not be included. We never include both forces of an action-reaction pair.
- Convert the free-body diagram into a more detailed diagram showing the x- and y-components of a given force (this is often helpful when solving a problem using Newton’s first or second law). In this case, place a squiggly line through the original vector to show that it is no longer in play—it has been replaced by its x- and y-components.
- If there are two or more objects, or bodies, in the problem, draw a separate free-body diagram for each object.
Note: If there is acceleration, we do not directly include it in the free-body diagram; however, it may help to indicate acceleration outside the free-body diagram. You can label it in a different color to indicate that it is separate from the free-body diagram.
Let’s apply the problem-solving strategy in drawing a free-body diagram for a sled. In Figure 5.8.1a, a sled is pulled by force →P at an angle of 30°. In part (b), we show a free-body diagram for this situation, as described by steps 1 and 2 of the problem-solving strategy. In part (c), we show all forces in terms of their x- and y-components, in keeping with step 3.
Construct the free-body diagram for object A and object B in Figure 5.8.1.
Strategy
We follow the four steps listed in the problem-solving strategy.
Solution
We start by creating a diagram for the first object of interest. In Figure 5.8.2a, object A is isolated (circled) and represented by a dot.
We now include any force that acts on the body. Here, no applied force is present. The weight of the object acts as a force pointing vertically downward, and the presence of the cord indicates a force of tension pointing away from the object. Object A has one interface and hence experiences a normal force, directed away from the interface. The source of this force is object B, and this normal force is labeled accordingly. Since object B has a tendency to slide down, object A has a tendency to slide up with respect to the interface, so the friction fBA is directed downward parallel to the inclined plane.
As noted in step 4 of the problem-solving strategy, we then construct the free-body diagram in Figure 5.32(b) using the same approach. Object B experiences two normal forces and two friction forces due to the presence of two contact surfaces. The interface with the inclined plane exerts external forces of NB and fB, and the interface with object B exerts the normal force NAB and friction fAB; NAB is directed away from object B, and fAB is opposing the tendency of the relative motion of object B with respect to object A.
Significance
The object under consideration in each part of this problem was circled in gray. When you are first learning how to draw free-body diagrams, you will find it helpful to circle the object before deciding what forces are acting on that particular object. This focuses your attention, preventing you from considering forces that are not acting on the body
A force is applied to two blocks in contact, as shown.
Strategy
Draw a free-body diagram for each block. Be sure to consider Newton’s third law at the interface where the two blocks touch.
Solution
Significance
→A21 is the action force of block 2 on block 1. →A12 is the reaction force of block 1 on block 2. We use these free-body diagrams in Applications of Newton’s Laws.
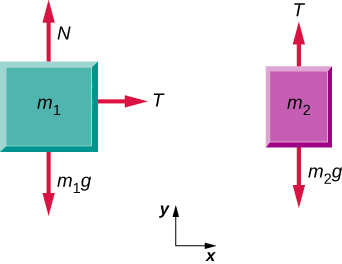
A block rests on the table, as shown. A light rope is attached to it and runs over a pulley. The other end of the rope is attached to a second block. The two blocks are said to be coupled. Block m2 exerts a force due to its weight, which causes the system (two blocks and a string) to accelerate.
Strategy
We assume that the string has no mass so that we do not have to consider it as a separate object. Draw a free-body diagram for each block.
Solution
Significance
Each block accelerates (notice the labels shown for →a1 and →a2); however, assuming the string remains taut, they accelerate at the same rate. Thus, we have |→a1| = |→a2|. If we were to continue solving the problem, we could simply call the acceleration →a. Also, we use two free-body diagrams because we are usually finding tension T, which may require us to use a system of two equations in this type of problem. The tension is the same on both m1 and m2.
- Draw the free-body diagram for the situation shown.
- Redraw it showing components; use x-axes parallel to the two ramps.
View this simulation to predict, qualitatively, how an external force will affect the speed and direction of an object’s motion. Explain the effects with the help of a free-body diagram. Use free-body diagrams to draw position, velocity, acceleration, and force graphs, and vice versa. Explain how the graphs relate to one another. Given a scenario or a graph, sketch all four graphs.