
18.3: More Examples



- Last updated
- Nov 6, 2023
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)

Consider a penguin sitting on a ramp, as shown in the figure on the left. The ramp makes an angle of 15∘ with respect to the floor, the mass of the penguin is 45 kg, and the coefficient of static friction between the penguin and the ramp is 0.20.
- In the figure on the left, will the penguin slide down the ramp or not?
- Now I tie a rope to the penguin, as shown in the figure on the right. This rope goes over a frictionless, massless pulley. How hard must I pull on the rope before the penguin just starts to move?
Two children are going to race their sleds across a frozen pond. They run towards the pond and jump onto the sleds, and race for a point 10 m away from their starting point. The first child has a mass of 40 kg, and his sled has a coefficient of friction of 0.023. The second child is less massive (35 kg), but her sled has a larger coefficient of friction, 0.035.
- Which child will win the race, assuming the only forces acting on them are gravity and the contact force between the ice and sleds?
- When whoever wins reaches the finish line, how far behind them is the other?
- What is each of their speeds at the end of the race?
- A 1400-kg car, starting from rest, accelerates to a speed of 30 mph in 10 s. What is the force on the car (assumed constant) over this period of time?
- Where does this force comes from? That is, what is the (external) object that exerts this force on the car, and what is the nature of this force?
- Draw a free-body diagram for the car. Indicate the direction of motion, and the direction of the acceleration.
- Now assume that the driver, traveling at 30 mph, sees a red light ahead and pushes on the brake pedal. Assume that the coefficient of static friction between the tires and the road is μs = 0.7, and that the wheels don’t “lock”: that is to say, they continue rolling without slipping on the road as they slow down. What is the car’s minimum stopping distance?
- Draw a free-body diagram of the car for the situation in (d). Again indicate the direction of motion, and the direction of the acceleration.
- Now assume that the driver again wants to stop as in part (c), but he presses on the brakes too hard, so the wheels lock, and, moreover, the road is wet, and the coefficient of kinetic friction is only μk = 0.2. What is the distance the car travels now before coming to a stop?
Solution
(a) First, let us convert 30 mph to meters per second. There are 1, 609 meters to a mile, and 3, 600 seconds to an hour, so 30 mph = 10 × 1609/3600 m/s = 13.4 m/s.
Next, for constant acceleration, we can use Equation (2.2.4): Δv=aΔt. Solving for a,
a=ΔvΔt=13.4m/s10s=1.34ms2.
Finally, since F=ma, we have
F=ma=1400kg×1.34ms2=1880N.
(b) The force must be provided by the road, which is the only thing external to the car that is in contact with it. The force is, in fact, the force of static friction between the car and the tires. As explained in the chapter, this is a reaction force (the tires push on the road, and the road pushes back). It is static friction because the tires are not slipping relative to the road. In fact, we will see in Chapter 9 that the point of the tire in contact with the road has an instantaneous velocity of zero (see Figure 9.6.1).
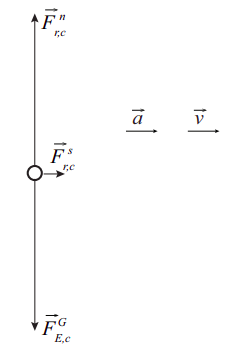
(c) This is the free-body diagram. Note the force of static friction pointing forward, in the direction of the acceleration. The forces have been drawn to scale.
(d) This is the opposite of part (a): the driver now relies on the force of static friction to slow down the car. The shortest stopping distance will correspond to the largest (in magnitude) acceleration, as per our old friend, Equation (2.2.10):
v2f−v2i=2aΔx.
In turn, the largest acceleration will correspond to the largest force. As explained in the chapter, the static friction force cannot exceed μsFn (Equation (6.3.8)). So, we have
Fsmax=μsFn=μsmg
since, in this case, we expect the normal force to be equal to the force of gravity. Then
|amax|=Fsmaxm=μsmgm=μsg.
We can substitute this into Equation (???) with a negative sign, since the acceleration acts in the opposite direction to the motion (and we are implicitly taking the direction of motion to be positive). Also note that the final velocity we want is zero, vf = 0. We get
−v2i=2aΔx=−2μsgΔx.
From here, we can solve for Δx:
Δx=v2i2μsg=(13.4m/s)22×0.7×9.81m/s2=13.1m.
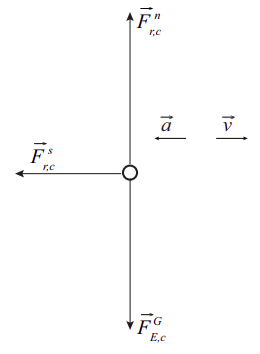
(e) Here is the free-body diagram. The interesting feature is that the force of static friction has reversed direction relative to parts (a)–(c). It is also much larger than before. (The forces are again to scale.)
(f) The math for this part is basically identical to that in part (d). The difference, physically, is that now you are dealing with the force of kinetic (or “sliding”) friction, and that is always given by Fk=μkFn (this is not an upper limit, it’s just what Fk is). So we have a=−Fk/m=−mukg, and, just as before (but with μk replacing μs),
Δx=v2i2μkg=(13.4m/s)22×0.2×9.81m/s2=45.8m.
This is a huge distance, close to half a football field! If these numbers are accurate, you can see that locking your brakes in the rain can have some pretty bad consequences.