
9.5: Rotational Kinetic Energy
- Page ID
- 16986

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)learning objectives
- Express the rotational kinetic energy as a function of the angular velocity and the moment of inertia, and relate it to the total kinetic energy
Rotational kinetic energy is the kinetic energy due to the rotation of an object and is part of its total kinetic energy. Looking at rotational energy separately around an object’s axis of rotation yields the following dependence on the object’s moment of inertia:
Kinetic Energy of Rotation: Things that roll without slipping have some fraction of their energy as translational kinetic and the remainder as rotational kinetic. The ratio depends on the moment of inertia of the object that’s rolling.
\[\mathrm{E_{rotational}=\dfrac{1}{2}Iω^2,}\]
where \(\mathrm{ω}\) is the angular velocity and \(\mathrm{I}\) is the moment of inertia around the axis of rotation.
The mechanical work applied during rotation is the torque (\(\mathrm{τ}\)) times the rotation angle \(\mathrm{(θ):W=τθ}\).
The instantaneous power of an angularly accelerating body is the torque times the angular velocity: \(\mathrm{P=τω}\).
Note the close relationship between the result for rotational energy and the energy held by linear (or translational) motion:
\[\mathrm{E_{translational}=\dfrac{1}{2}mv^2.}\]
In the rotating system, the moment of inertia takes the role of the mass and the angular velocity takes the role of the linear velocity.
As an example, let us calculate the rotational kinetic energy of the Earth (animated in Figure 1 ). As the Earth has a period of about 23.93 hours, it has an angular velocity of 7.29×10−5 rad/s. The Earth has a moment of inertia, I = 8.04×1037 kg·m2. Therefore, it has a rotational kinetic energy of 2.138×1029 J.
The Rotating Earth: The earth’s rotation is a prominent example of rotational kinetic energy.
This can be partially tapped using tidal power. Additional friction of the two global tidal waves creates energy in a physical manner, infinitesimally slowing down Earth’s angular velocity. Due to conservation of angular momentum this process transfers angular momentum to the Moon’s orbital motion, increasing its distance from Earth and its orbital period.
Moment of Inertia
The moment of inertia is a property of a mass that measures its resistance to rotational acceleration about one or more axes.
learning objectives
- Identify a property of a mass described by the moment of inertia
The Moment of Inertia
The moment of inertia is a property of the distribution of mass in space that measures mass’s resistance to rotational acceleration about one or more axes. Newton’s first law, which describes the inertia of a body in linear motion, can be extended to the inertia of a body rotating about an axis using the moment of inertia. That is, an object that is rotating at constant angular velocity will remain rotating unless it is acted upon by an external torque. In this way, the moment of inertia plays the same role in rotational dynamics as mass does in linear dynamics: it describes the relationship between angular momentum and angular velocity as well as torque and angular acceleration.
Moment of Inertia: A brief introduction to moment of inertia (rotational inertia) for calculus-based physics students.
The moment of inertia I of an object can be defined as the sum of \(\mathrm{mr^2}\) for all the point masses of which it is composed, where m is the mass and r is the distance of the mass from the center of mass. It can be expressed mathematically as: \(\mathrm{I = ∑mr^2}\). Here, \(\mathrm{I}\) is analogous to \(\mathrm{m}\) in translational motion.
As an example, consider a hoop of radius r. Assuming that the hoop material is uniform, the hoop’s moment of inertia can be found by summing up all the mass of the hoop and multiplying by the distance of that mass from the center of mass. Since the hoop is a circle and the mass is uniform around the circle, the moment of inertia is \(\mathrm{mr^2}\). All of the mass m is at a distance r from the center.
Moment of inertia also depends on the axis about which you rotate an object. Objects will usually rotate about their center of mass, but can be made to rotate about any axis. The moment of inertia in the case of rotation about a different axis other than the center of mass is given by the parallel axis theorem. The theorem states that the moment of inertia for an object rotated about a different axis parallel to the axis passing through the center of mass is \(\mathrm{I_{cm}+mr^2}\) where r is now the distance between the two axes and IcmIcmis the moment of inertia when rotated about the center of mass which you learned how to calculate in the previous paragraph.
A general relationship among the torque, moment of inertia, and angular acceleration is: \(\mathrm{net \; τ = Iα,}\) or \(\mathrm{α = \frac{(net \; τ)}{ I}}\). Net τ is the total torque from all forces relative to a chosen axis. Such torques are either positive or negative and add like ordinary numbers. The relationship in \(\mathrm{τ = Iα}\) is the rotational analog to Newton’s second law and is very applicable. This equation is actually valid for any torque, applied to any object, and relative to any axis.
As can be expected, the larger the torque, the larger the angular acceleration. For example, the harder a child pushes on a merry-go-round, the slower it accelerates for the same torque. The basic relationship between the moment of inertia and the angular acceleration is that the larger the moment of inertia, the smaller the angular acceleration. The moment of inertia depends not only on the mass of an object, but also on its distribution of mass relative to the axis around which it rotates. For example, it wil be much easier to accelerate a merry-go-round full of children if they stand close to its axis than if they all stand at the outer edge.
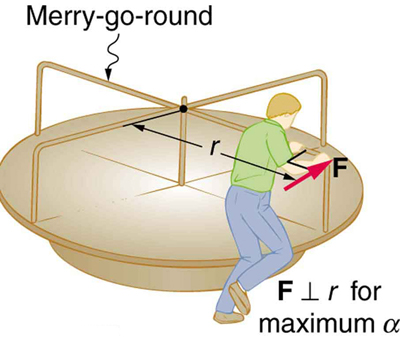
Moment of Inertia on a Merry-Go-Round: A father pushes a playground merry-go-round at its edge and perpendicular to its radius to achieve maximum torque.
Key Points
- Rotational kinetic energy can be expressed as: \(\mathrm{E_{rotational}=\dfrac{1}{2}Iω^2}\) where \(\mathrm{ω}\) is the angular velocity and \(\mathrm{I}\) is the moment of inertia around the axis of rotation.
- The mechanical work applied during rotation is the torque times the rotation angle: \(\mathrm{(θ):W=τθ}\).
- The instantaneous power of an angularly accelerating body is the torque times the angular velocity: \(\mathrm{P=τω}\).
- There is a close relationship between the result for rotational energy and the energy held by linear (or translational) motion.
- Newton’s first law, which describes the inertia of a body in linear motion, can be extended to the inertia of a body rotating about an axis using the moment of inertia.
- An object that is rotating at constant angular velocity will remain rotating unless it is acted upon by an external torque.
- The larger the torque, the larger the angular acceleration.
Key Items
- torque: A rotational or twisting effect of a force; (SI unit newton-meter or Nm; imperial unit foot-pound or ft-lb)
- inertia: The property of a body that resists any change to its uniform motion; equivalent to its mass.
- angular velocity: A vector quantity describing an object in circular motion; its magnitude is equal to the speed of the particle and the direction is perpendicular to the plane of its circular motion.
LICENSES AND ATTRIBUTIONS
CC LICENSED CONTENT, SHARED PREVIOUSLY
- Curation and Revision. Provided by: Boundless.com. License: CC BY-SA: Attribution-ShareAlike
CC LICENSED CONTENT, SPECIFIC ATTRIBUTION
- Richard Baldwin, Phy1300: Angular Momentum -- Rotational Kinetic Energy and Inertia. September 17, 2013. Provided by: OpenStax CNX. Located at: http://cnx.org/content/m38440/latest/. License: CC BY: Attribution
- Rotational energy. Provided by: Wikipedia. Located at: en.Wikipedia.org/wiki/Rotational_energy. License: CC BY-SA: Attribution-ShareAlike
- inertia. Provided by: Wiktionary. Located at: en.wiktionary.org/wiki/inertia. License: CC BY-SA: Attribution-ShareAlike
- Boundless. Provided by: Boundless Learning. Located at: www.boundless.com//physics/definition/angular-velocity. License: CC BY-SA: Attribution-ShareAlike
- torque. Provided by: Wiktionary. Located at: en.wiktionary.org/wiki/torque. License: CC BY-SA: Attribution-ShareAlike
- Provided by: Wikimedia. Located at: upload.wikimedia.org/Wikipedia/commons/3/30/Globespin.gif. License: CC BY-SA: Attribution-ShareAlike
- Kinetic Energy of Rotation. Located at: http://www.youtube.com/watch?v=KGuyId5W6jY. License: Public Domain: No Known Copyright. License Terms: Standard YouTube license
- Moment of inertia. Provided by: Wikipedia. Located at: en.Wikipedia.org/wiki/Moment_of_inertia. License: CC BY-SA: Attribution-ShareAlike
- OpenStax College, College Physics. September 17, 2013. Provided by: OpenStax CNX. Located at: http://cnx.org/content/m42179/latest/?collection=col11406/1.7. License: CC BY: Attribution
- inertia. Provided by: Wiktionary. Located at: en.wiktionary.org/wiki/inertia. License: CC BY-SA: Attribution-ShareAlike
- torque. Provided by: Wiktionary. Located at: en.wiktionary.org/wiki/torque. License: CC BY-SA: Attribution-ShareAlike
- Provided by: Wikimedia. Located at: http://upload.wikimedia.org/Wikipedia/commons/3/30/Globespin.gif. License: CC BY-SA: Attribution-ShareAlike
- Kinetic Energy of Rotation. Located at: http://www.youtube.com/watch?v=KGuyId5W6jY. License: Public Domain: No Known Copyright. License Terms: Standard YouTube license
- OpenStax College, College Physics. November 9, 2012. Provided by: OpenStax CNX. Located at: http://cnx.org/content/m42179/latest/?collection=col11406/1.7. License: CC BY: Attribution
- Moment of Inertia. Located at: http://www.youtube.com/watch?v=eoBYvPF5KL0. License: Public Domain: No Known Copyright. License Terms: Standard YouTube license