
6.1: Linking Linear and Angular Momentum



- Last updated
- Nov 26, 2023
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Rotational Impulse-Momentum Theorem
By now we have a very good sense of how to develop the formalism for rotational motion in parallel with what we already know about linear motion. We turn now to momentum. Replacing the mass with rotational inertia and the linear velocity with angular velocity, we get:
The vector L is called angular momentum, and it has units of:
[L]=kg⋅m2s=J⋅s
Continuing the parallel with the linear case, the momentum is relates to the force through the impulse-momentum theorem, which is:
tB∫tA→Fnetdt=Δ→pcm⟺tB∫tA→τnetdt=Δ→L
While there is no need to append "cm" to the angular momentum as we do with the linear momentum, we do have to keep in mind that all of the quantities in the rotational case must be referenced to the same point. That is, the net torque requires a reference point, and the angular momentum contains a rotational inertia, which also requires a reference point.
Recall that the impulse-momentum theorem is just a repackaging of Newton's second law, and so it is with the rotational case, though there is a twist, as we will see shortly:
→Fnet=d→pcmdt=d(m→vcm)dt=m→acm⟺→τnet=d→Ldt=d(I→ω)dt=I→α
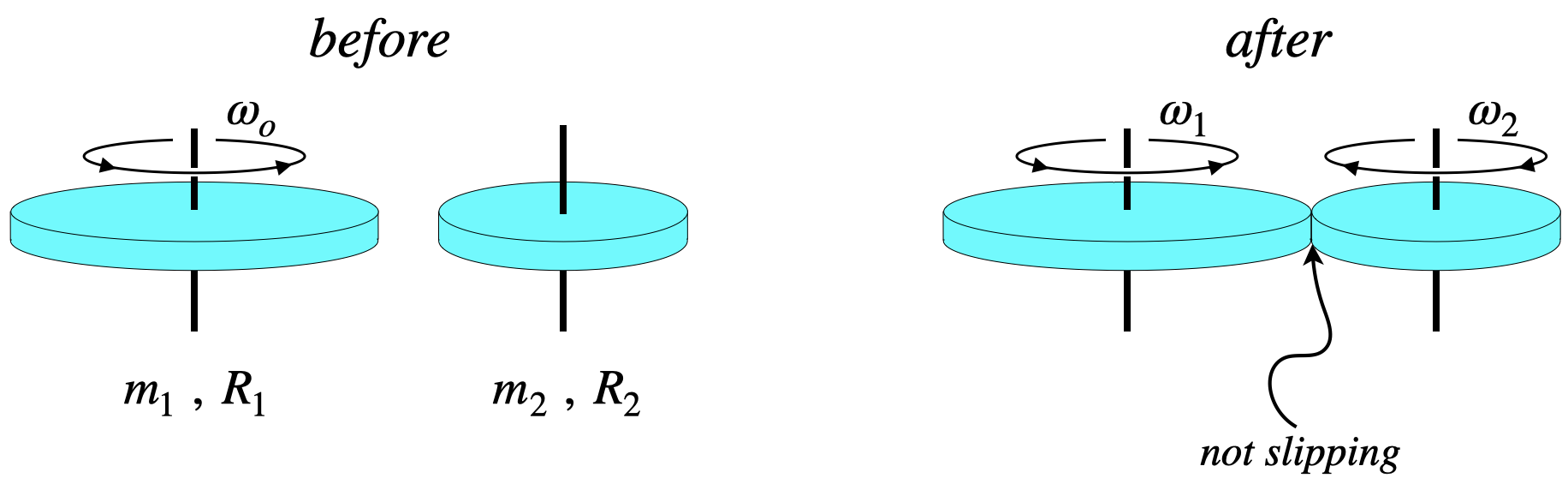
Two uniform disks are free to rotate frictionlessly around vertical axles. Initially one of the disks is rotating, while the other is not. They are then brought together so that their outer edges rub against each other. Kinetic friction between the two rubbing surfaces slows down disk #1, while speeding up disk #2. This continues until their rotational speeds are such that no slipping occurs between the two surfaces. With kinetic friction no longer present, they continue with constant rotational motion from this point forward.
- Analysis
-
The surfaces stop slipping when the outer edges of the two disks are moving at the same linear (tangential) speed. We therefore have the "after" constraint:
v1=v2 ⇒ R1ω1=R2ω2
The friction force exerts torques on both disks. Newton's 3rd law ensures that each disk experiences the same magnitude of kinetic friction, and for the same period of time, but the torques about their axles are different, because the moment-arms are not equal (the disks have different radii). So the two disks experience different magnitudes of rotational impulse, and the ratio of the magnitudes of these impulses is:
|τ1|Δt|τ2|Δt=fkR1ΔtfkR2Δt=R1R2
These rotational impulses equal the changes in the angular momenta of their respective disks, which we can write in terms of the before & after values:
|ΔL1|=I1|Δω1|=12m1R21(ωo−ω1)
|ΔL2|=I2|Δω2|=12m2R22(ω2−0)
Plugging these angular momentum changes into the impulse ratios above gives:
|ΔL1||ΔL2|=|τ1|Δt|τ2|Δt ⇒ m1m2R21R22(ωo−ω1ω2)=R1R2 ⇒ m1m2(ωo−ω1ω2)=R2R1
We can now use our constraint on the two "after" angular speeds to solve for each of them:
m1m2(ωo−ω1R1R2ω1)=R2R1 ⇒ ω1=(m1m1+m2)ωo
ω2=R1R2ω1 ⇒ ω2=R1R2(m1m1+m2)ωo
Link Between Angular and Linear Momentum
When there are several particles in a system, we find the momentum of the system by adding the momenta of the particles:
→pcm=→p1+→p2+…
We have a definition for the angular momentum of a rigid object, but can we define the angular momentum of a single particle, and then add up all of the angular momenta of the particles to get the angular momentum of the system, in the same way that we do it for linear momentum? The answer is yes, but we have to be careful about our reference point. That is, to add the angular momentum of every particle together to get a total angular momentum, the individual angular momenta must be measured around the same reference.
So how do we define the angular momentum of an individual particle around a certain reference point? Let's look at a picture of the situation. The particle has a mass m, a velocity →v, and is located at a position →r with the tail of that position vector at the reference point.