
11.1: Simple Harmonic Motion



- Last updated
- Aug 8, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
I am assuming that this is by no means the first occasion on which the reader has met simple harmonic motion, and hence in this section I merely summarize the familiar formulas without spending time on numerous elementary examples
Simple harmonic motion can be defined as follows: It a point P moves in a circle of radius a at constant angular speed ω (and hence period 2πω) its projection Q on a diameter moves with simple harmonic motion. This is illustrated in Figure XI.1, in which the velocity and acceleration of P and of Q are shown as coloured arrows. The velocity of P is just aω and its acceleration is the centripetal acceleration aω2. As in Chapter 8 and elsewhere, I use blue arrows for velocity vectors and green for acceleration.
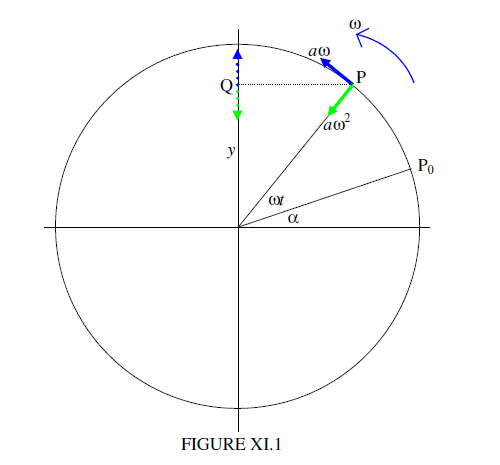
P0 is the initial position of P - i.e. the position of P at time t=0 - and a is the initial phase angle. At time t later, the phase angle is ωt+α. The projection of P upon a diameter is Q. The displacement of Q from the origin, and its velocity and acceleration, are
y=asin(ωt+α)
v=˙y=aωcos(ωt+α)
¨y=−aω2sin(ωt+α).
Equations ??? and ??? can be obtained immediately either by inspection of Figure XI.1 or by differentiation of Equation ???. Elimination of the time from Equations ??? and ??? and from Equations ??? and ??? leads to
v=˙y=ω(a2−y2)12
and
An alternative definition of simple harmonic motion is to define as simple harmonic motion any motion that obeys the differential Equation ???. We then have the problem of solving this differential Equation. We can make no progress with this unless we remember to write ¨y as vdvdy (recall that we did this often in Chapter 6.) Equation ??? then immediately integrates to
v2=ω2(a2−y2)
A further integration, with v=dydt, leads to
y=asin(ωt+α)
provided we remember to use the appropriate initial conditions. Differentiation with respect to time then leads to Equation ???, and all the other Equations follow.
Important Problem.
Show that y=asin(ωt+α) can be written
y=Asinωt+Bcosωt
where A=acosα and B=asinα. The converse of these are a=√A2+B2,cosα=A√A2+B2,sinα=B√A2+B2. It is important to note that, if A and B are known, in order to calculate a without ambiguity of quadrant it is entirely necessary to calculate both cosα and sinα. It will not do, for example, to calculate α solely from α=tan−1(yx) because this will give two possible solutions for a differing by 180o.
Show also that Equation ??? can also be written
y=Meiωt+Ne−iωt,
where M=12(B−iA) and N=12(B+iA) show that the right hand side of Equation ??? is real.
The four large satellites of Jupiter furnish a beautiful demonstration of simple harmonic motion. Earth is almost in the plane of their orbits, so we see the motion of satellites projected on a diameter. They move to and fro in simple harmonic motion, each with different amplitude (radius of the orbit), period (and hence angular speed ω ) and initial phase angle α.