
3.2: Linear Restoring Forces




- Last updated
- Feb 10, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
An oscillatory system requires that there be a stable equilibrium about which the oscillations occur. Consider a conservative system with potential energy U for which the force is given by
F=−∇U
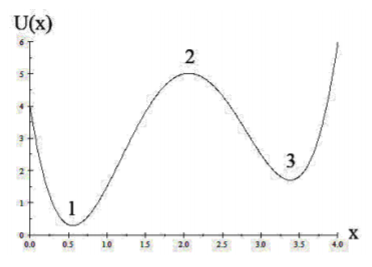
Figure 3.2.1 illustrates a conservative system that has three locations at which the restoring force is zero, that is, where the gradient of the potential is zero. Stable oscillations occur only around locations 1 and 3 whereas the system is unstable at the zero gradient location 2. Point 2 is called a separatrix in that an infinitessimal displacement of the particle from this separatrix will cause the particle to diverge towards either minimum 1 or 3 depending on which side of the separatrix the particle is displaced.
The requirements for stable oscillations about any point x0 are that the potential energy must have the following properties.
Stability requirements
- The potential has a stable position for which the restoring force is zero, i.e. (dUdx)x=x0=0
- The potential U must be positive and an even function of displacement x−x0. That is. (dnUdxn)x0>0 where n is even.
The requirement for the restoring force to be linear is that the restoring force for perturbation about a stable equilibrium at x0 is of the form
F=−α(x−x0)=m¨x
The potential energy function for a linear oscillator has a pure parabolic shape about the minimum location, that is,
U=12k(x−x0)2
where x0 is the location of the minimum.
Most oscillatory systems involve small amplitude oscillations about a stable minimum. For weak non-linear systems, where the amplitude of oscillation Δx about the minimum is small, it is useful to make a Taylor expansion of the potential energy about the minimum. That is
U(Δx)=U(x0)+ΔxdU(x0)dx+Δx22!d2U(x0)dx2+Δx33!d3U(x0)dx3+Δx44!d4U(x0)dx4+…
By definition, at the minimum dU(x0)dx=0, and thus Equation ??? can be written as
ΔU=U(Δx)−U(x0)=Δx22!d2U(x0)dx2+Δx33!d3U(x0)dx3+Δx44!d4U(x0)dx4+…
For small amplitude oscillations, the system is linear if the second-order Δx22!d2U(x0)dx2 term in Equation ??? is dominant.
The linearity for small amplitude oscillations greatly simplifies description of the oscillatory motion and complicated chaotic motion is avoided. Most physical systems are approximately linear for small amplitude oscillations, and thus the motion close to equilibrium approximates a linear harmonic oscillator.