
6.4: Period and Frequency for Uniform Circular Motion
- Page ID
- 24455
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)If the object is constrained to move in a circle and the total tangential force acting on the object is zero, \(F_{\theta}^{\text {total }}=0\) then (Newton’s Second Law), the tangential acceleration is zero,
\[a_{\theta}=0 \nonumber \]
This means that the magnitude of the velocity (the speed) remains constant. This motion is known as uniform circular motion. The acceleration is then given by only the acceleration radial component vector
\(\overrightarrow{\mathbf{a}}_{r}(t)=-r \omega^{2}(t) \hat{\mathbf{r}}(t)\) uniform circular motion .
Because the speed \(v=r|\omega|\) is constant, the amount of time that the object takes to complete one circular orbit of radius r is also constant. This time interval, T , is called the period. In one period the object travels a distance s = vT equal to the circumference, \(s=2 \pi r\); thus
\[s=2 \pi r=v T \nonumber \]
The period T is then given by
\[T=\frac{2 \pi r}{v}=\frac{2 \pi r}{r \omega}=\frac{2 \pi}{\omega} \nonumber \]
The frequency f is defined to be the reciprocal of the period,
\[f=\frac{1}{T}=\frac{\omega}{2 \pi} \nonumber \]
The SI unit of frequency is the inverse second, which is defined as the hertz, \(\left[\mathrm{s}^{-1}\right] \equiv[\mathrm{Hz}]\)
The magnitude of the radial component of the acceleration can be expressed in several equivalent forms since both the magnitudes of the velocity and angular velocity are related by v = rω . Thus we have several alternative forms for the magnitude of the centripetal acceleration. The first is that in Equation (6.5.3). The second is in terms of the radius and the angular velocity,
\[\left|a_{r}\right|=r \omega^{2} \nonumber \]
The third form expresses the magnitude of the centripetal acceleration in terms of the speed and radius,
\[\left|a_{r}\right|=\frac{v^{2}}{r} \nonumber \]
Recall that the magnitude of the angular velocity is related to the frequency by \(\omega=2 \pi f\), so we have a fourth alternate expression for the magnitude of the centripetal acceleration in terms of the radius and frequency,
\[\left|a_{r}\right|=4 \pi^{2} r f^{2} \nonumber \]
A fifth form commonly encountered uses the fact that the frequency and period are related by \(f=1 / T=\omega / 2 \pi\). Thus we have the fourth expression for the centripetal acceleration in terms of radius and period,
\[\left|a_{r}\right|=\frac{4 \pi^{2} r}{T^{2}} \nonumber \]
Other forms, such as \(4 \pi^{2} r^{2} f / T\) or \(2 \pi r \omega f\), while valid, are uncommon.
Often we decide which expression to use based on information that describes the orbit. A convenient measure might be the orbit’s radius. We may also independently know the period, or the frequency, or the angular velocity, or the speed. If we know one, we can calculate the other three but it is important to understand the meaning of each quantity.
Geometric Interpretation for Radial Acceleration for Uniform Circular Motion
An object traveling in a circular orbit is always accelerating towards the center. Any radial inward acceleration is called centripetal acceleration. Recall that the direction of the velocity is always tangent to the circle. Therefore the direction of the velocity is constantly changing because the object is moving in a circle, as can be seen in Figure 6.4. Because the velocity changes direction, the object has a nonzero acceleration.
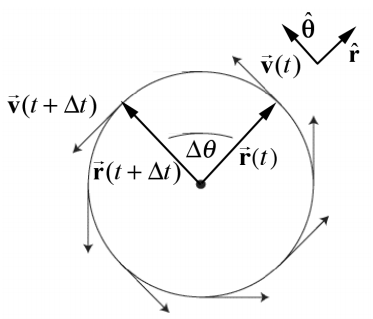
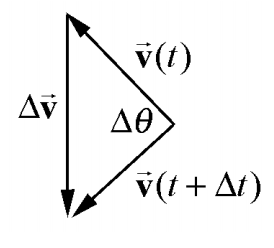
The calculation of the magnitude and direction of the acceleration is very similar to the calculation for the magnitude and direction of the velocity for circular motion, but the change in velocity vector, \(\Delta \overrightarrow{\mathbf{v}}\) is more complicated to visualize. The change in velocity \(\Delta \overrightarrow{\mathbf{v}}=\overrightarrow{\mathbf{v}}(t+\Delta t)-\overrightarrow{\mathbf{v}}(t)\) is depicted in Figure 6.5. The velocity vectors have been given a common point for the tails, so that the change in velocity, \(\Delta \overrightarrow{\mathbf{v}}\) can be visualized. The length \(|\Delta \overrightarrow{\mathbf{v}}|\) of the vertical vector can be calculated in exactly the same way as the displacement \(|\Delta \overrightarrow{\mathbf{r}}|\). The magnitude of the change in velocity is
\[|\Delta \overrightarrow{\mathbf{v}}|=2 v \sin (\Delta \theta / 2) \nonumber \]
We can use the small angle approximation \(\sin (\Delta \theta / 2) \cong \Delta \theta / 2\) to approximate the magnitude of the change of velocity,
\[|\Delta \overrightarrow{\mathbf{v}}| \cong v|\Delta \theta| \nonumber \]
The magnitude of the radial acceleration is given by
\[\left|a_{r}\right|=\lim _{\Delta t \rightarrow 0} \frac{|\Delta \overrightarrow{\mathbf{v}}|}{\Delta t}=\lim _{\Delta t \rightarrow 0} \frac{v|\Delta \theta|}{\Delta t}=v \lim _{\Delta t \rightarrow 0} \frac{|\Delta \theta|}{\Delta t}=v\left|\frac{d \theta}{d t}\right|=v|\omega| \nonumber \]
The direction of the radial acceleration is determined by the same method as the direction of the velocity; in the limit \(\Delta \theta \rightarrow 0, \Delta \overrightarrow{\mathbf{v}} \perp \overrightarrow{\mathbf{v}}\) and so the direction of the acceleration radial component vector \(\overrightarrow{\mathbf{a}}_{r}(t)\) at time t is perpendicular to position vector \(\overrightarrow{\mathbf{v}}(t)\) and directed inward, in the \(-\hat{\mathbf{r}}\)-direction.