
6.5: Angular Velocity and Angular Acceleration
- Page ID
- 24456
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\). Angular Velocity
We shall always choose a right-handed cylindrical coordinate system. If the positive z - axis points up, then we choose θ to be increasing in the counterclockwise direction as shown in Figures 6.6.
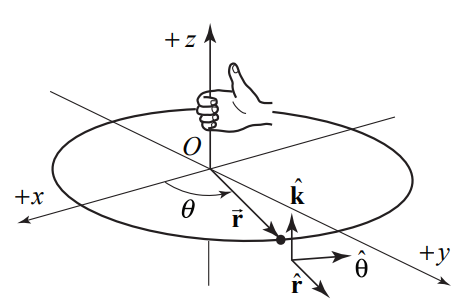
For a point object undergoing circular motion about the z -axis, the angular velocity vector \(\vec{\omega}\) is directed along the z -axis with z -component equal to the time derivative of the angle θ,
\[\vec{\omega}=\frac{d \theta}{d t} \hat{\mathbf{k}}=\omega_{z} \hat{\mathbf{k}} \nonumber \]
The SI units of angular velocity are \(\left[\mathrm{rad} \cdot \mathrm{s}^{-1}\right]\) Note that the angular speed is just the magnitude of the z -component of the angular velocity,
\[\omega \equiv\left|\omega_{z}\right|=\left|\frac{d \theta}{d t}\right| \nonumber \]
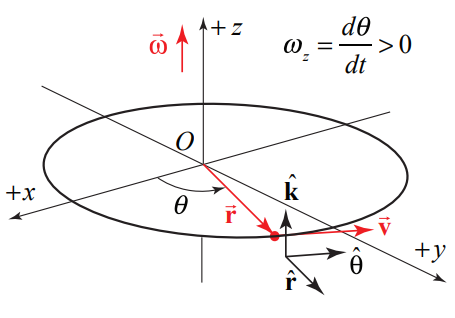
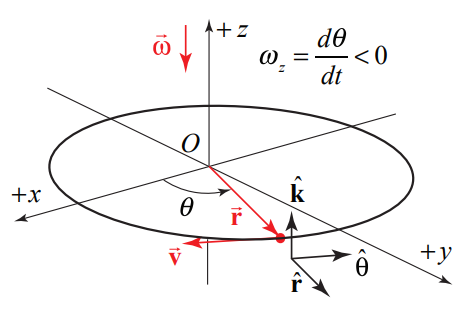
If the velocity of the object is in the \(+\hat{\boldsymbol{\theta}}\)-direction, (rotating in the counterclockwise direction in Figure 6.7(a)), then the z -component of the angular velocity is positive, \(\omega_{z}=d \theta / d t>0\) The angular velocity vector then points in the \(+\hat{\mathbf{k}}\)-direction as shown in Figure 6.7(a). If the velocity of the object is in the \(-\hat{\boldsymbol{\theta}}\)-direction, (rotating in the clockwise direction in Figure 6.7(b)), then the z -component of the angular velocity angular velocity is negative, \(\omega_{z}=d \theta / d t<0\). The angular velocity vector then points in the \(-\hat{\mathbf{k}}\)-direction as shown in Figure 6.7(b).
The velocity and angular velocity are related by
\[\overrightarrow{\mathbf{v}}=\overrightarrow{\boldsymbol{\omega}} \times \overrightarrow{\mathbf{r}}=\frac{d \theta}{d t} \hat{\mathbf{k}} \times r \hat{\mathbf{r}}=r \frac{d \theta}{d t} \hat{\boldsymbol{\theta}} \nonumber \]
Example 6.2 Angular Velocity
A particle is moving in a circle of radius R. At t = 0 , it is located on the x -axis. The angle the particle makes with the positive x -axis is given by \(\theta(t)=A t-B t^{3}\) where A and B are positive constants. Determine (a) the angular velocity vector, and (b) the velocity vector. Express your answer in polar coordinates. (c) At what time, \(t=t_{1}\) is the angular velocity zero? (d) What is the direction of the angular velocity for 1. \(t<t_{1}\) 2. \(t>t_{1} ?\)?
Solution:
The derivative of \(\theta(t)=A t-B t^{3}\) is
\[\frac{d \theta(t)}{d t}=A-3 B t^{2} \nonumber \]
Therefore the angular velocity vector is given by
\[\overrightarrow{\boldsymbol{\omega}}(t)=\frac{d \theta(t)}{d t} \hat{\mathbf{k}}=\left(A-3 B t^{2}\right) \hat{\mathbf{k}} \nonumber \]
The velocity is given by
\[\overrightarrow{\mathbf{v}}(t)=R \frac{d \theta(t)}{d t} \hat{\mathbf{\theta}}(t)=R\left(A-3 B t^{2}\right) \hat{\boldsymbol{\theta}}(t) \nonumber \]
The angular velocity is zero at time \(t=t_{1}\) when
\[A-3 B t_{1}^{2}=0 \Rightarrow t_{1}=\sqrt{A / 3 B} \nonumber \]
For \(t<t_{1}, \frac{d \theta(t)}{d t}=A-3 B t_{1}^{2}>0\) hence \(\overrightarrow{\boldsymbol{\omega}}(t)\) points in the positive \(\hat{\mathbf{k}}\)-direction.
For \(t>t_{1}, \frac{d \theta(t)}{d t}=A-3 B t_{1}^{2}<0\) hence \(\overrightarrow{\boldsymbol{\omega}}(t)\) points in the positive \(\hat{\mathbf{k}}\)-direction.
Angular Acceleration
In a similar fashion, for a point object undergoing circular motion about the fixed z -axis, the angular acceleration is defined as
\[\vec{\alpha}=\frac{d^{2} \theta}{d t^{2}} \hat{\mathbf{k}}=\alpha_{z} \hat{\mathbf{k}} \nonumber \]
The SI units of angular acceleration are \(\left[\mathrm{rad} \cdot \mathrm{s}^{-2}\right]\) The magnitude of the angular acceleration is denoted by the Greek symbol alpha,
\[\alpha \equiv|\vec{\alpha}|=\left|\frac{d^{2} \theta}{d t^{2}}\right| \nonumber \]
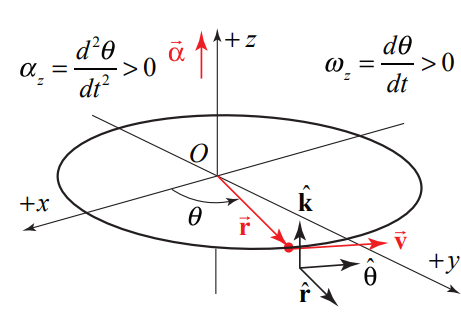
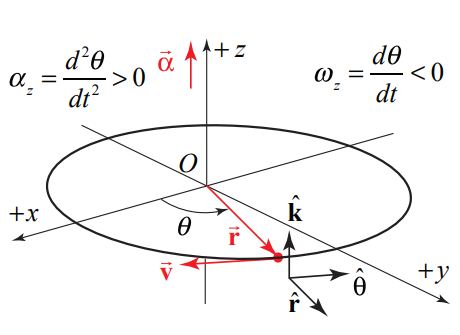
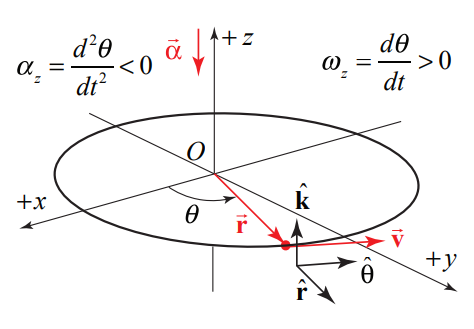
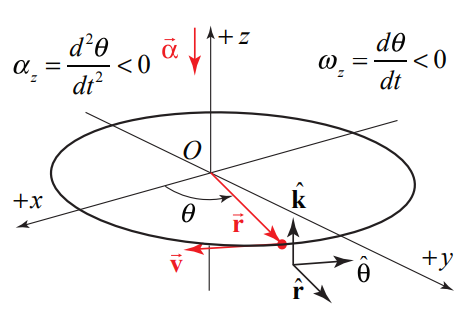
There are four special cases to consider for the direction of the angular velocity. Let’s first consider the two types of motion with \(\overrightarrow{\boldsymbol{\alpha}}\) pointing in the \(\hat{\mathbf{k}}\)-direction: (i) if the object is rotating counterclockwise and speeding up then both \(d \theta / d t>0\) and \(d^{2} \theta / d t^{2}>0\) (Figure 6.8(a)) (ii) if the object is rotating clockwise and slowing down then \(d \theta / d t<0\) but \(d^{2} \theta / d t^{2}>0\) (Figure 6.8(b). There are two corresponding cases in which \(\vec{\alpha}\) pointing in the \(-\hat{\mathbf{k}}\)-direction (iii) if the object is rotating counterclockwise and slowing down then \(d \theta / d t>0\) but \(d^{2} \theta / d t^{2}<0\) (Figure 6.9(a), (iv) if the object is rotating clockwise and speeding up then both \(d \theta / d t<0\) and \(d^{2} \theta / d t^{2}<0\) (Figure 6.9(b).
Example 6.3 Integration and Circular Motion Kinematics
A point-like object is constrained to travel in a circle. The z -component of the angular acceleration of the object for the time interval \(\left[0, t_{1}\right]\) is given by the function
\[\alpha_{z}(t)=\left\{\begin{array}{l}
b\left(1-\frac{t}{t_{1}}\right) ; 0 \leq t \leq t_{1} \\
0 ; t>t_{1}
\end{array}\right. \nonumber \]
where b is a positive constant with units rad\(\cdot \mathrm{S}^{-2}\).
a) Determine an expression for the angular velocity of the object at \(t=t_{1}\).
b) Through what angle has the object rotated at time \(t=t_{1}\)?
Solution:
a) The angular velocity at time \(t=t_{1}\) is given by
\[\omega_{z}\left(t_{1}\right)-\omega_{z}(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} \alpha_{z}\left(t^{\prime}\right) d t^{\prime}=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} b\left(1-\frac{t^{\prime}}{t_{1}}\right) d t^{\prime}=b\left(t_{1}-\frac{t_{1}^{2}}{2 t_{1}}\right)=\frac{b t_{1}}{2} \nonumber \]
b) In order to find the angle \(\theta\left(t_{1}\right)-\theta(t=0)\) that the object has rotated through at time \(t=t_{1}\), you first need to find \(\omega_{z}(t)\) by integrating the z-component of the angular acceleration
\[\omega_{z}(t)-\omega_{z}(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t} \alpha_{z}\left(t^{\prime}\right) d t^{\prime}=\int_{t=0}^{t^{\prime}=t} b\left(1-\frac{t^{\prime}}{t_{1}}\right) d t^{\prime}=b\left(t-\frac{t^{2}}{2 t_{1}}\right) \nonumber \]
Because it started from rest, \(\omega_{z}(t=0)=0\), hence \(\omega_{z}(t)=b\left(t-\frac{t^{2}}{2 t_{1}}\right) ; 0 \leq t \leq t_{1}\)
Then integrate \(\omega_{z}(t)\) between t = 0 and \(t=t_{1}\) to find that
\[\theta\left(t_{1}\right)-\theta(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} \omega_{z}\left(t^{\prime}\right) d t^{\prime}=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} b\left(t^{\prime}-\frac{t^{\prime 2}}{2 t_{1}}\right) d t^{\prime}=b\left(\frac{t_{1}^{2}}{2}-\frac{t_{1}^{3}}{6 t_{1}}\right)=\frac{b t_{1}^{2}}{3} \nonumber \]