
10.5: Center of Mass




- Last updated
- Jul 20, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Consider two point-like particles with masses m1 and m2. Choose a coordinate system with a choice of origin such that body 1 has position →r1 and body 2 has position →r2 (Figure 10.5).

The center of mass vector, →Rcm, of the two-body system is defined as
→Rcm=m1→r1+m2→r2m1+m2
We shall now extend the concept of the center of mass to more general systems. Suppose we have a system of N particles labeled by the index i=1,2,3,⋯,N. Choose a coordinate system and denote the position of the ith particle as →ri. The mass of the system is given by the sum
msys=i=N∑i=1mi
and the position of the center of mass of the system of particles is given by
→Rcm=1msysi=N∑i=1mi→ri
(For a continuous rigid body, each point-like particle has mass dm and is located at the position →r′ The center of mass is then defined as an integral over the body,
→Rcm=∫bdydm→r′∫bodydm
Example 10.2 Center of Mass of the Earth-Moon System
The mean distance from the center of the earth to the center of the moon is rem=3.84×108m. The mass of the earth is me=5.98×1024kg and the mass of the moon is mm=7.34×1022kg. The mean radius of the earth is re=6.37×106m. The mean radius of the moon is rm=1.74×106m. Where is the location of the center of mass of the earthmoon system? Is it inside the earth’s radius or outside?
Solution: The center of mass of the earth-moon system is defined to be
→Rcm=1msysi=N∑i=1mi→ri=1me+mm(me→re+mm→rm)
Choose an origin at the center of the earth and a unit vector ˆi pointing towards the moon, then →re=→0. The center of mass of the earth-moon system is then
→Rcm=1me+mm(me→re+mm→rm)=mm→remme+mm=mmremme+mmˆi
→Rcm=(7.34×1022kg)(3.84×108m)(5.98×1024kg+7.34×1022kg)ˆi=4.66×106mˆi
The earth’s mean radius is re=6.37×106m so the center of mass of the earth-moon system lies within the earth.
Example 10.3 Center of Mass of a Rod
A thin rod has length L and mass M.

(a) Suppose the rod is uniform (Figure 10.6a). Find the position of the center of mass with respect to the left end of the rod. (b) Now suppose the rod is not uniform (Figure 10.6b) with a linear mass density that varies with the distance x from the left end according to
λ(x)=λ0L2x2
where λ0 is a constant and has SI units [kg⋅m−1]. Find λ0 and the position of the center of mass with respect to the left end of the rod.
Solution: (a) Choose a coordinate system with the rod aligned along the x -axis and the origin located at the left end of the rod. The center of mass of the rod can be found using the definition given in Equation (10.5.4). In that expression dm is an infinitesimal mass element and →r is the vector from the origin to the mass element dm (Figure 10.6c).
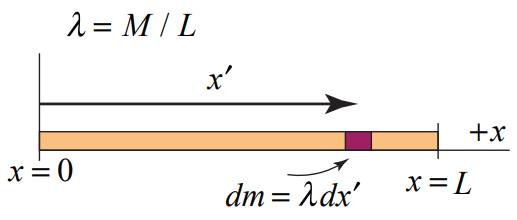
Choose an infinitesimal mass element dm located a distance x′ from the origin. In this problem x′ will be the integration variable. Let the length of the mass element be dx′. Then
dm=λdx′
The vector →r=x′ˆi. The center of mass is found by integration
→Rcm=1M∫body →rdm=1L∫xx′=0x′dx′ˆi=12Lx′2|x′=Lx′=0ˆi=12L(L2−0)ˆi=L2ˆi
(b) For a non-uniform rod (Figure 10.6d),

the mass element is found using Equation (10.5.8)
dm=λ(x′)dx′=λ=λ0L2x′2dx′
The vector →r=x′ˆi. The mass is found by integrating the mass element over the length of the rod
M=∫body dm=∫x=Lx′=0λ(x′)dx′=λ0L2∫x=Lx′=0x′2dx′=λ03L2x3|x′=Lx′=0=λ03L2(L3−0)=λ03L
Therefore
λ0=3ML
The center of mass is again found by integration
→Rcm=1M∫body→rdm=3λ0L∫xx′=0λ(x′)x′dx′ˆi=3L3∫xx′=0x′3dx′ˆi→Rcm=34L3x′4|x′=0ˆi=34L3(L4−0)ˆi=34Lˆi