
13.5: Work done by Non-Constant Forces




- Last updated
- Jul 20, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Consider a body moving in the x -direction under the influence of a non-constant force in the x -direction, →F=Fxˆi. The body moves from an initial position xi to a final position xf. In order to calculate the work done by a non-constant force, we will divide up the displacement of the point of application of the force into a large number N of small displacements Δxj where the index j marks the jth displacement and takes integer values from 1 to N . Let (Fx,j)ave denote the average value of the x -component of the force in the displacement interval [xj−1,xj]. For the jth displacement interval we calculate the contribution to the work.
Wj=(Fx,j)ave Δxj
This contribution is a scalar so we add up these scalar quantities to get the total work
WN=j=N∑j=1Wj=j=N∑j=1(Fx,j)ave Δxj
The sum in Equation (13.5.2) depends on the number of divisions N and the width of the intervals Δxj. In order to define a quantity that is independent of the divisions, we take the limit as N→∞ and |Δxj|→0 for all j . The work is then
W=lim
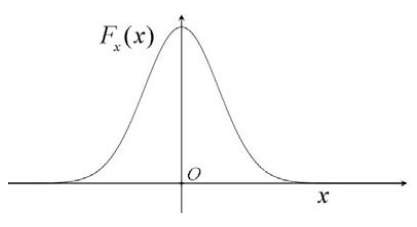
This last expression is the definite integral of the x -component of the force with respect to the parameter x . In Figure 13.5 we graph the x -component of the force as a function of the parameter x . The work integral is the area under this curve between x=x_{i} and x=x_{f}.
Example \PageIndex{1}: Work done by the Spring Force
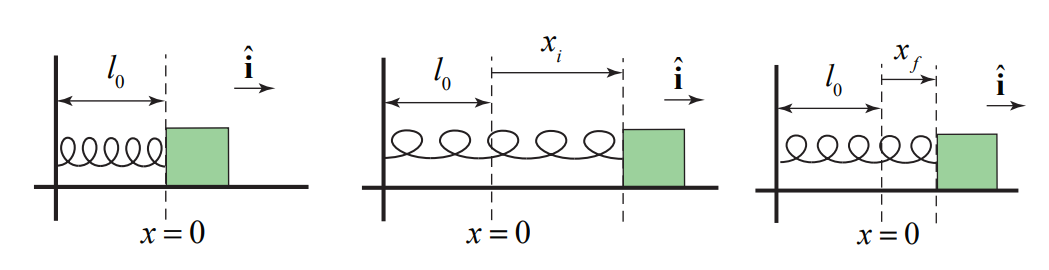
Connect one end of an unstretched spring of length l_{0} with spring constant k to an object resting on a smooth frictionless table and fix the other end of the spring to a wall. Choose an origin as shown in the figure. Stretch the spring by an amount x_{i} and release the object. How much work does the spring do on the object when the spring is stretched by an amount x_{f}?
Solution
We first begin by choosing a coordinate system with our origin located at the position of the object when the spring is unstretched (or uncompressed). We choose the \hat{\mathbf{i}} unit vector to point in the direction the object moves when the spring is being stretched. We choose the coordinate function x to denote the position of the object with respect to the origin. We show the coordinate function and free-body force diagram in the figure below.
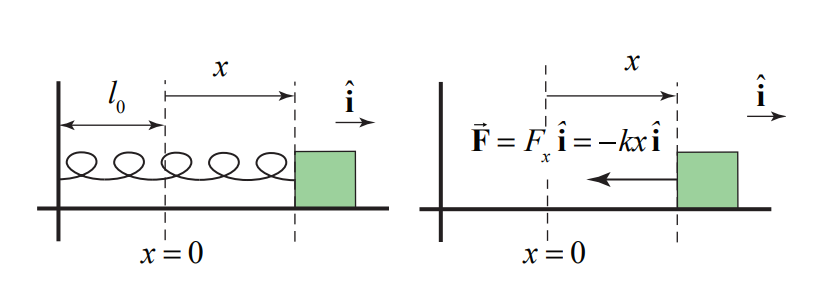
The spring force on the object is given by (Figure 13.6a)
\overrightarrow{\mathbf{F}}=F_{x} \hat{\mathbf{i}}=-k x \hat{\mathbf{i}} \nonumber
In Figure 13.7 we show the graph of the x -component of the spring force, F_{x}(x), as a function of x
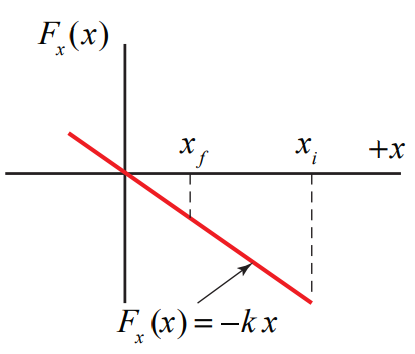
The work done is just the area under the curve for the interval x_{i} to x_{f},
W=\int_{x^{\prime}=x_{i}}^{x^{\prime}=x_{f}} F_{x}\left(x^{\prime}\right) d x^{\prime}=\int_{x^{\prime}=x_{i}}^{x^{\prime}=x_{f}}-k x^{\prime} d x^{\prime}=-\frac{1}{2} k\left(x_{f}^{2}-x_{i}^{2}\right) \nonumber
This result is independent of the sign of x_{i} and x_{f} because both quantities appear as squares. If the spring is less stretched or compressed in the final state than in the initial state, then the absolute value, \left|x_{f}\right|<\left|x_{i}\right| and the work done by the spring force is positive. The spring force does positive work on the body when the spring goes from a state of “greater tension” to a state of “lesser tension.”