
4.9: Centrifugal and Coriolis Forces
- Page ID
- 8396

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)We are usually told in elementary books that there is “no such thing” as centrifugal force. When a satellite orbits around Earth, it is not held in equilibrium between two equal and opposite forces, namely gravity acting towards Earth and centrifugal force acting outwards. In reality, we are told, the satellite is accelerating (the centripetal acceleration); there is only one force, namely the gravitational force, which is equal to the mass times the centripetal acceleration.
Yet when we drive round a corner too fast and we feel ourselves flung away from the centre of curvature of our path, the “centrifugal force” certainly feels real enough, and indeed we can solve problems referred to rotating coordinate systems as if there “really” were such a thing as “centrifugal force”.
Let’s look at an even simpler example, not even involving rotation. A car is accelerating at a rate \( a\) towards the right. See Figure IV.20 – but forgive my limited artistic abilities. Drawing a motor car is somewhat beyond my skills.
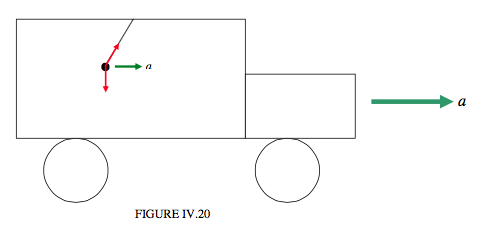
There is a plumb-bob hanging from the roof of the car, but, because of the acceleration of the car, it is not hanging vertically. Some would say that there are but two forces on the plumb-bob – its weight and the tension in the string – and, as a result of these, the bob is accelerating towards the right. By application of \( F = ma\) it is easily possible to find the tension in the string and the angle that the string makes with the vertical.
The passenger in the car, however, sees things rather differently (Figure IV.21.)
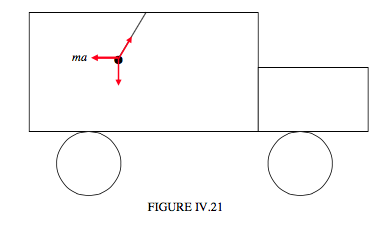
To the passenger in the car, nothing is accelerating. The plumb-bob is merely in static equilibrium under the action of three forces, one of which is a force \( ma\) towards the left. To the question “But what is the agent that is causing this so-called force?” I counter with the question “What is the agent that is causing the downward force that you attribute to some mysterious ‘gravity’ ”?
It seems that, when referred to the reference frame of Figure IV.20, there are only two forces, but when referred to the accelerating reference frame of Figure IV.21, the system can be described perfectly well by postulating the existence of a force \( ma\) pulling towards the left. This is in fact a principle in classical mechanics, known as d’Alembert’s principle, whereby, if one refers the description of a system to an accelerating reference frame, one can replace an acceleration with a force in the opposite direction. It results in a perfectly valid description of the behavior of a system, and will accurately predict how the system will behave. So who’s to say which forces are “real” and which are “fictitious”, and which reference frame is better than another?
The situation is similar with respect to centrifugal force. If you consider a satellite in orbit around Earth, some would say that there is only one force acting on the satellite, namely the gravitational force towards Earth. The satellite, being in a circular orbit, is accelerating towards the centre of the circle, and all is as expected - \( F = ma\). The acceleration is the centripetal acceleration (peto – I desire). An astronaut on board the satellite may have a different point of view. He is at a constant distance from Earth, not
accelerating; he is in static equilibrium, and he feels no net force on him whatever – he feels weightless. If he has been taught that Earth exerts a gravitational force, then this must be balanced by a force away from Earth. This force, which becomes apparent when referred to a corotating reference frame, is the centrifugal force (fugo – I flee, like a fugitive). It would need a good lawyer to argue that the invisible gravitational force towards Earth is a real force, while the equally invisible force acting away from Earth is imaginary. In truth, all forces are “imaginary” – in that they are only devices or concepts used in physics to describe and predict the behavior of matter.
I mentioned earlier a possible awful examination question: Explain why Earth bulges at the equator, without using the term “centrifugal force”. Just thank yourself lucky if you are not asked such a question! People who have tried to answer it have come up with some interesting ideas. I have heard (I do not know whether it is true) that someone once offered a prize of $1000 to anyone who could prove that Earth is rotating, and that the prize has never been claimed! Some have tried to imagine how you would determine whether Earth is rotating if it were the only body in the universe. There would be no external reference points against which one could measure the orientation of Earth. It has been concluded (by some) that even to think of Earth rotating in the absence of any external reference points is meaningless, so that one certainly could not determine how fast, or even whether and about what axis, Earth was rotating. Since “rotation” would then be meaningless, there would be no centrifugal force, Earth would not bulge, nor would the Foucault pendulum rotate, nor would naval shells deviate from their paths, nor would cyclones and anticyclones exist in the atmosphere.
Centrifugal force comes into existence only when there is an external universe. It is the external universe, then, revolving around the stationary Earth, that causes centrifugal force and all the other effects that we have mentioned. These are deep waters indeed, and I do not pursue this aspect further here. We shall merely take the pragmatic view that problems in mechanics can often be solved by referring motions to a corotating reference frame, and that the behavior of mechanical systems can successfully and accurately be described and predicted by postulating the “existence” of “inertial” forces such as centrifugal and Coriolis forces, which make themselves apparent only when referred to a rotating frame. Thus, rather than involving ourselves in difficult questions about whether such forces are real, we shall take things easy with just a few simple Equations.
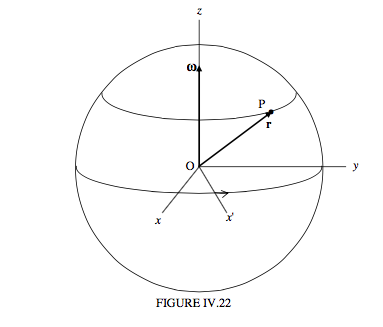
\( \Sigma = Oxyz\) is an inertial reference frame (i.e. not accelerating or rotating).
\( \Sigma = Ox^{\prime}y^{\prime}z^{\prime}\) is a frame that is rotating about the \( z\)-axis with angular velocity \( \omega = \omega \hat{z} \).
Three questions:
- If P is a point that is fixed with respect to \( \Sigma^{\prime}\), what is its velocity \( \bf{v}\) with respect to \( \Sigma\)?
- If P is a point that is moving with velocity \( \bf{v^{\prime}}\) with respect to \( \Sigma^{\prime}\), what is its velocity \( \bf{v}\) with respect to \( \Sigma\)?
- If P is a point that has an acceleration \( \bf{a}^{\prime}\) with respect to \( \Sigma^{\prime}\), what is its acceleration a with respect to \( \Sigma\)?
1. The answer to the first question is, I think, fairly easy. Just by inspection of Figure XV.22, I hope you will agree that it is
\[ \ { \bf v} = \boldsymbol\omega \times { \bf r} \tag{4.9.1}\label{eq:4.9.1} \]
In case this is not clear, try the following argument. At some instant the position vector of P with respect to \( \Sigma\) is \( \bf{r}\). At a time \( \delta t\) later its position vector is \( { \bf r} + \bf{\delta r}\), where \( \bf{\delta r} = r\sin \theta\omega\delta t\) and \( \bf{\delta r}\) is at right angles to \( \bf{r}\), and is directed along the small circle
whose zenith angle is \( \theta\), in the direction of motion of P with respect to \( \Sigma\). Expressed
alternatively,
\[ \bf{\delta r} = r\sin \theta\omega\delta t\bf{\hat{\phi}}. \nonumber \]
Draw the vector \( \bf{\delta r}\) on the Figure if it helps. Divide
both sides by \( \delta t\) and take the limit as \(\delta t\rightarrow 0\) to get \( \bf{\dot{r}}\). The magnitude and direction of \( \bf{\dot{r}}\) are then expressed by the single vector Equation \( \bf{\dot{r}=\boldsymbol\omega \times r}\), or \( \bf{v =\boldsymbol\omega \times r}\).
The only thing to look out for is this. In two-dimensional problems we are often used to expressing the relation between linear and angular speed by \( v=r\omega\), and it doesn't matter which way round we write \( r\) and \( \omega\). When we are doing a three-dimensional problem using vector notation, it is important to remember that it is \( {\bf v} =\boldsymbol\omega \times {\bf r}\).and not the other way round.
2. If P is moving with velocity \( {\bf v^{\prime}}\) with respect to \( \Sigma^{\prime}\), then its velocity \( \bf{v}\) with respect to \( \Sigma\) must be
\[ \ { \bf v} = \bf{v^{\prime}} + \boldsymbol\omega \times { \bf r} \tag{4.9.2}\label{eq:4.9.2} \]
This shows that
\[ \ (\frac{d}{dt})_{ \Sigma } = (\frac{d}{dt})_{ \Sigma ' } + \boldsymbol\omega \times \tag{4.9.3}\label{eq:4.9.3} \]
What this Equation is intended to convey is that the operation of differentiating with respect to time when referred to the inertial frame \( \Sigma\) has the same result as differentiating with respect to time when referred to the rotating frame \( \Sigma^{\prime}\), plus the operation \(\boldsymbol\omega\times\). We shall understand this a little better in the next paragraph.
3. If P is accelerating with respect to \( \Sigma^{\prime}\), we can apply the operation \( \ref{eq:4.9.3}\) to the Equation \( \ref{eq:4.9.2}\):
\[ {\bf a} = (\frac{d}{dt})_{ \Sigma^{\prime}} ({\bf v}^{\prime} + \omega \times {\bf r}) + \boldsymbol \omega \times ({\bf v}^{\prime} + \boldsymbol\omega \times {\bf r}) \nonumber \]
\[ = {\bf a}^{\prime} +\boldsymbol\omega \times \bf{v^{\prime}} + \boldsymbol\omega \times \bf{v^{\prime}} +\omega \times ( \boldsymbol\omega \times {\bf r} ). \nonumber \]
\[ \therefore {\bf a} = {\bf a}^{\prime} + \boldsymbol\omega \times( \boldsymbol\omega \times {\bf r}) + 2 \boldsymbol\omega\times \bf{v^{\prime}} \tag{4.9.4}\label{eq:4.9.4} \]
This, then, anwers the third question we posed. All we have to do now is understand what it means.
To start with, let us return to the case where P is neither moving nor accelerating with respect to \( \Sigma^{\prime}\). In that case, Equation \( \ref{eq:4.9.4}\) is just
\[ \ {\bf a} = \boldsymbol\omega \times( \boldsymbol\omega \times {\bf r}) \tag{4.9.5}\label{eq:4.9.5} \]
which we could easily have obtained by applying the operator \( \ref{eq:4.9.3}\) to \( \ref{eq:4.9.1}\). Let us try and understand what this means. In what follows, a “hat” ( ^ ) denotes a unit vector.
We have
\[ \boldsymbol\omega \times {\bf r} = \boldsymbol\omega { \bf r} \sin \theta\hat{\phi} \nonumber \]
and hence
\[ \boldsymbol\omega \times(\boldsymbol\omega \times { \bf r}) = \boldsymbol\omega \hat{z} \times \boldsymbol\omega {\bf r} \sin \theta\hat{\phi} = { \bf r } \boldsymbol\omega \sin \theta \hat{\ bf z} \times \hat{\boldsymbol\phi} \nonumber \]
and \( \hat{ \bf z} \times \hat{\boldsymbol\phi}\) is a unit vector directed towards the \( z\)-axis. Notice that the point P is moving at angular speed \( \bf{\omega}\) in a small circle of radius \( r \sin\theta\). The expression \( a = \omega \times(\omega \times r ) = r \omega^{2} \sin \theta\hat{ \bf z} \times \hat{\boldsymbol\phi} \), then, is just the familiar centripetal acceleration, of magnitude r \( r \omega^{2}\sin\theta\), directed towards the axis of rotation.
We could also think of \( \boldsymbol\omega \times ( \boldsymbol\omega \times { \bf r})\) as a triple vector product.
We recall that
\[ {\bf A} \times({ \bf B} \times { \bf C} )=({ \bf A} \cdot { \bf C)B-(A\cdot B)C} \nonumber \]
so that
\[ \boldsymbol\omega \times ( \boldsymbol\omega \times { \bf r})=(w\cdot r)\boldsymbol\omega-\omega^{2}{ \bf r}. \nonumber \]
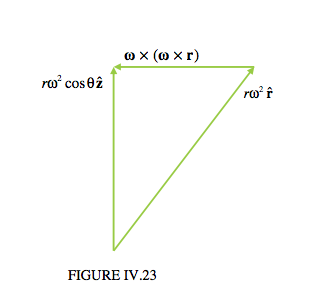
That is \( \boldsymbol\omega \times (\boldsymbol\omega \times {\bf r}) = {\ bf r} \omega^{2} cos \theta \hat{\bf z} - r\omega^{2} \hat{\bf r} \).
This can be illustrated by the vector diagram shown in Figure IV.23. The vectors are drawn in green, in accordance with my convention of red, blue and green for force, velocity and acceleration respectively.
However, Equation \( \ref{eq:4.9.4}\) also tells us that, if a particle is moving with velocity \( \bf{v^{\prime}}\) with respect to \( \Sigma^{\prime}\), it has an additional acceleration with respect to \( \Sigma\) of \( 2\omega\times v^{\prime}\), which is at right angles to \( \bf{v^{\prime}}\) and to \( \boldsymbol\omega\). This is the Coriolis acceleration.
The converse of Equation \( \ref{eq:4.9.4}\) is
\[ {\bf a^{\prime}} = { \bf a} + \boldsymbol\omega \times( {\bf r} \times \boldsymbol\omega ) = 2{ \bf v^{ prime}} \times \boldsymbol\omega \tag{4.9.6}\label{eq:4.9.6} \]
\[ {\bf F^{\prime}}= { \bf F} + m \boldsymbol\omega\times( { \bf r} \times\boldsymbol\omega) + 2m{\bf v^{\prime}} \times \boldsymbol\omega \tag{4.9.7}\label{eq:4.9.7} \]
It is worth now spending a few moments thinking about the direction of the Coriolis force
\[ 2m{ \bf v^{\prime}}\times \boldsymbol\omega. \nonumber \]
Earth is spinning on its axis with a period of 24 sidereal hours (23h and 56m of solar time.). The vector \( \bf{\omega}\) is directed upwards through the north pole. Now go to somewhere on Earth at latitude 45° N. Fire a naval shell to the north. To the east. To the south. To the west. Now go to the equator and repeat the experiment. Go to the north pole. There you can fire only due south. Repeat the experiment at 45° south, and at the south pole. Each time, think about the direction of the vector \( 2mv^{\prime}\times\omega\). If your thoughts are to my thoughts, your mind to my mind, you should conclude that the shell veers to the right in the northern hemisphere and to the left in the southern hemisphere, and that the Coriolis force is zero at the equator. As air rushes out of a high pressure system in the northern hemisphere, it will swirl clockwise around the pressure centre. As it rushes in to a low pressure system, it will swirl counterclockwise. The opposite situation will happen in the southern hemisphere.
You can think of the Coriolis force on a naval shell as being a consequence of conservation of angular momentum. Go to 45° N and point your naval gun to the north. Your shell, while waiting in the breech, is moving around Earth’s axis at a linear speed of \( \omega R \sin\) 45°, where \( R\) is the radius of Earth. Now fire the shell to the north. By the time it reaches latitude 50° N, it is being carried around Earth’s axis in a small circle of radius only \( R \sin\) 40°. In order for angular momentum to be conserved, its angular speed around the axis must speed up – it will be deviated towards the east.
Now try another thought experiment (Gedanken Prüfung.). Go to the equator and build a tall tower. Drop a stone from the top of the tower. Think now about the direction of the vector \( 2mv^{\prime}\times\omega\). I really mean it – think hard. Or again, think about conservation of angular momentum. The stone drops closer to Earth’s axis of rotation. It must conserve angular momentum. It falls to the east of the tower (not to the west!).
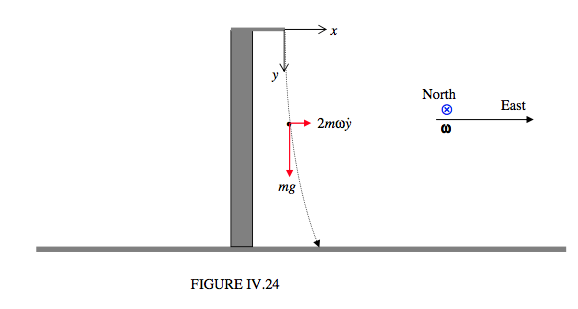
The two forces on the stone are its weight mg and the Coriolis force. Earth’s spin vector \( \boldsymbol\omega\) is to the north. The Coriolis force is at right angles to the stone’s velocity. If we resolve the stone’s velocity into a vertically down component \( \dot{y} \) and a horizontal east component \( \dot{z} \), the corresponding components of the Coriolis force will be \( 2m\omega \dot{y} \) to the east and \( 2m\omega \dot{x} \) upward. However, I’m going to assume that \( \dot{z} \) << \( \dot{y} \) and the only significant Coriolis force is the eastward component \( 2m\omega \dot{y} \), which I have drawn. Another way of stating the approximation is to say that the upward component of the Coriolis force is negligible compared with the weight mg of the stone.
After dropping for a time t, the y-coordinate of the stone is found in the usual way from
\[ \ddot{y}= g, \quad \dot{y} = gt, \quad y = \frac{1}{2}gt^{2}, \nonumber \]
and the x- coordinate is found from
\[ \ddot{x}=2\omega\dot{y} = 2 \omega gt, \quad \dot{x} = \omega gt^{2}, \quad x = \frac{1}{3} \omega gt^{3} \nonumber \]
Thus you can find out how far to the east it has fallen after two seconds, or how far to the east it has fallen if the height of the tower is 100 metres. The Equation to the trajectory would be the \( t\)-eliminant, which is
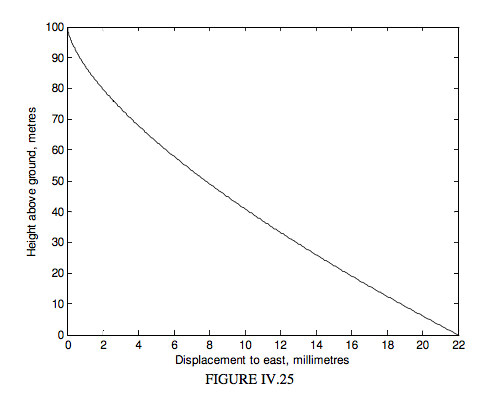
\[ \ x^{2} = \frac{8\omega^{2}}{9g}y^{3} \tag{4.9.8}\label{eq:4.9.8} \]
For Earth, \( \bf{\omega}\) = 7.292 × 10−5 rad s−1, and at the equator g = 9.780 m s−2, so that
\[\frac{8\omega^{2}}{9g} = 4.788 \times 10^{-10} m^{-1}. \nonumber \]
The path is graphed in Figure IV.25 for a 100-metre tower. The horizontal scale is exaggerated by a factor of about 6000.
I once asked myself the question whether a migrating bird could navigate by using the Coriolis force. After all, if it were flying north in the northern hemisphere, it would experience a Coriolis force to its right; might this give it navigational information? I published an article on this in The Auk 97, 99 (1980). Let me know what you think!
You may have noticed the similarity between the Equation for the Coriolis force
\[ \bf{F} =2mv^{\prime}\times\omega \nonumber \]
and the Equation for the Lorentz force on an electric charge moving in a magnetic field:
\[ \bf{F} =qv\times B. \nonumber \]
The analogy can be pursued a bit further. If you rotate a coil in an electric field, a current will flow in the coil. That’s electromagnetic induction, and it is the principle of an electric generator. Sometime early in the twentieth century, the American physicist Arthur Compton (that’s not Denis Compton, of whom only a few of my readers will have heard, and very few indeed in North America) successfully tried an interesting experiment. He made some toroidal glass tubes, filled with water coloured with KMnO4, so that he could see the water, and he rotated these tubes about a horizontal or vertical diameter, and, lo, the water flowed around the tubes, just as a current flows in a coil when it is rotated in a magnetic field. Imagine a toroidal tube set up in an east-west vertical plane at the equator. The top part of the tube is slightly further from Earth’s rotation axis than the bottom part, and consequently the water near the top of tube has more angular momentum per unit mass, around Earth’s axis, than the water near the bottom. Now rotate the tune through 180° about its east-west horizontal diameter. The high angular momentum fluid moves closer to Earth’s rotation axis, and the low angular momentum fluid moves further from Earth’s axis. Therefore, in order to conserve angular momentum, the fluid must flow around the tube. By carrying out a series of such experiments, Compton was able, at least in principle, to measure the speed of Earth’s rotation, and even his latitude, without looking out of the window, and indeed without even being aware that there was an external universe out there. You may think that this was a very difficult experiment to do, but you do it yourself every day. There are three mutually orthogonal semicircular canals inside your ear, and, every time you move your head, fluid inside these semicircular canals flows in response to the Coriolis force, and this fluid flow is detected by little nerves, which send a message to your brain to tell you of your movements and to help you to keep your balance. You have a wonderful brain, which is why understanding physics is so easy.
Going back to the Lorentz force, we recall that a moving charge in a magnetic field experiences a force at right angles to its velocity. But what is the origin of a magnetic field? Well, a magnetic field exists, for example, in the interior of a solenoid in which there is a current of moving electrons in the coil windings, and it is these circulating electrons that ultimately cause the Lorentz force on a charge in the interior of the solenoid – just as it is the galaxies in the universe revolving around our stationary Earth which are the ultimate cause of the Coriolis force on a particle moving with respect to our Earth. But there I seem to be getting into deep waters again, so perhaps it is time to move on to something easier.