
19.6: Motion on a Cycloid, Cusps Down
- Page ID
- 7056

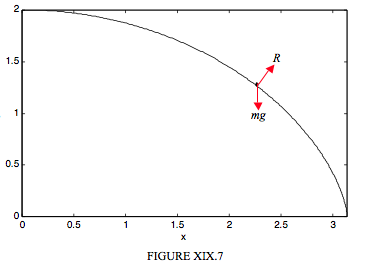
We imagine a particle sliding down the outside of an inverted smooth cycloidal bowl, or a bead sliding down a smooth cycloidal wire. We shall suppose that, at time \(t = 0\), the particle was at the top of the cycloid and was projected forward with a horizontal velocity \(v_0\). See Figure XIX.7.
This time, the equations of motion are
\[ \ddot{s} =g sin \psi \label{19.6.1} \]
and
\[ \dfrac{mv^2}{ \rho} = mg \cos \phi - R. \label{19.6.2} \]
By arguments similar to those made in Section 19.5, we find that
\[ \ddot{s} = \dfrac{gs}{4a} \label{19.6.3} \]
The general solution to this is
\[ s = Ae^{pt} + Be^{-pt}, \label{19.6.4} \]
where
\[ p = \sqrt{g/(2a)}. \label{19.6.5} \]
With the initial condition given (at \( t = 0, s = 0, \dot{s} = v_0 \) ), we can find A and B and hence:
\[ s = v_{0} \sqrt{\dfrac{a}{g}} (e^{pt} - e^{-pt})\label{19.6.6} \]
Again proceeding as in Section 19.5, we find for \(R\):
\[ R = \dfrac{m}{4 \cos \psi} (4ga \cos 2 \psi - v^2_0) . \label{19.6.7} \]
So – what happens?
If the constraint is two-sided (bead sliding on a wire) R becomes zero when \( \cos 2 \pi = v^2_0 / (2 /ga), \) and thereafter R is in the opposite direction.
If the constraint is one-sided (particle sliding down the outside of a smooth cycloidal bowl):
- If \(v^2_0\ > 4ga\), the particle loses contact at the moment of projection.
- If If \(v^2_0\ < 4ga\) the particle loses contact as soon as \( \cos 2 \pi = v^2_0 /(2ga)\), is very small (i.e. very much smaller than \(\sqrt(2ga) \) ), this will happen when \( \psi = 45 \circ \) ; for faster initial speeds, contact is lost sooner.
A particle is projected horizontally with speed v0 = 1 m s−1 from the vertex of the smooth cycloidal hill
\( x = a(2\theta + \sin 2 \theta \)
\( y = 2a \cos ^2 \theta , \)
where \( a = 2\) m. Assuming that g = 9.8 m s−2, how long does it take to get halfway down the hill (i.e. to \(y = a\))?
Solution
We have to use Equation \ref{19.6.6}. With the numerical data given, this is
\( s = 0.451754(e^{1.565248t} - e^{-1.565248t}). \)
We can find \(s\) from Equation 19.4.12, which gives us \(s\) = 2.828427 m. If we let we now have to solve 6.26099 = \( \xi - 1 / \xi \), or \(\xi^2 - 6.26099 \xi -1 = 0 \). From this, \( \xi \) = 6.41683 and hence \(t\) = 1.19 s.
I leave it to the reader to calculate R at this time – and indeed to see whether the particle loses contact with the hill before then. Perhaps the fact that I got a positive real root for \( \xi \) means that we are all right and the particle is still in contact – but I wouldn't be sure of that. I leave it to the reader to investigate further.