
7.3: Invariant Transformations and Noether’s Theorem
- Page ID
- 9603

One of the great advantages of Lagrangian mechanics is the freedom it allows in choice of generalized coordinates which can simplify derivation of the equations of motion. For example, for any set of coordinates, \(q_{j},\) a reversible point transformation can define another set of coordinates \( q_{j}^{\prime }\) such that
\[q_{j}^{\prime }=q_{j}^{\prime }(q_{1},q_{2},..q_{n};t)\]
The new set of generalized coordinates satisfies Lagrange’s equations of motion with the new Lagrangian
\[L(q^{\prime },\dot{q}^{\prime },t)=L(q,\dot{q},t)\]
The Lagrangian is a scalar, with units of energy, which does not change if the coordinate representation is changed. Thus \(L(q^{\prime },\dot{q} ^{\prime },t)\) can be derived from \(L(q,\dot{q},t)\) by substituting the inverse relation \(q_{i}=q_{i}(q_{1}^{\prime },q_{2}^{\prime },..q_{n}^{\prime };t)\) into \(L(q,\dot{q},t).\) That is, the value of the Lagrangian \(L\) is independent of which coordinate representation is used. Although the general form of Lagrange’s equations of motion is preserved in any point transformation, the explicit equations of motion for the new variables usually look different from those with the old variables. A typical example is the transformation from cartesian to spherical coordinates. For a given system, there can be particular transformations for which the explicit equations of motion are the same for both the old and new variables. Transformations for which the equations of motion are invariant, are called invariant transformations. It will be shown that if the Lagrangian does not explicitly contain a particular coordinate of displacement \(q_{i},\) then the corresponding conjugate momentum, \(p_{i},\) is conserved. This relation is called Noether’s theorem which states “For each symmetry of the Lagrangian, there is a conserved quantity".
Noether’s Theorem will be used to consider invariant transformations for two dependent variables, \(x(t),\) and \(\theta (t),\) plus their conjugate momenta \(p_{x}\) and \(p_{\theta }\). For a closed system, these provide up to six possible conservation laws for the three axes. Then we will discuss the independent variable \(t,\) and its relation to the Generalized Energy Theorem, which provides another possible conservation law. For simplicity, these discussions will assume that the systems are holonomic and conservative.
The Lagrange equations using generalized coordinates for holonomic systems, was given by equation \((6.5.12)\) to be
\[\left\{ \frac{d}{dt}\left( \frac{\partial L}{\partial \dot{q}_{j}}\right) -\frac{ \partial L}{\partial q_{j}}\right\} =\sum_{k=1}^{m}\lambda _{k}\frac{ \partial g_{k}}{\partial q_{j}}(\mathbf{q},t)+Q_{j}^{EXC}\]
This can be written in terms of the generalized momentum as
\[\left\{ \frac{d}{dt}p_{j}-\frac{\partial L}{\partial q_{j}}\right\} =\sum_{k=1}^{m}\lambda _{k}\frac{\partial g_{k}}{\partial q_{j}}(\mathbf{q} ,t)+Q_{j}^{EXC}\]
or equivalently as
\[\dot{p}_{j}=\frac{\partial L}{\partial q_{j}}+\left[ \sum_{k=1}^{m}\lambda _{k}\frac{\partial g_{k}}{\partial q_{j}}(\mathbf{q},t)+Q_{j}^{EXC}\right]\]
Note that if the Lagrangian \(L\) does not contain \(q_{i}\) explicitly, that is, the Lagrangian is invariant to a linear translation, or equivalently, is spatially homogeneous, and if the Lagrange multiplier constraint force and generalized force terms are zero, then
\[\frac{\partial L}{\partial q_{j}}+\left[ \sum_{k=1}^{m}\lambda _{k}\frac{ \partial g_{k}}{\partial q_{j}}(\mathbf{q},t)+Q_{j}^{EXC}\right] =0\]
In this case the Lagrange equation reduces to
\[\dot{p}_{j}=\frac{dp_{j}}{dt}=0 \label{7.13}\]
Equation \ref{7.13} corresponds to \(p_{j}\) being a constant of motion. Stated in words, the generalized momentum \(p_{i}\) is a constant of motion if the Lagrangian is invariant to a spatial translation of \(q_{i}\), and the constraint plus generalized force terms are zero. Expressed another way, if the Lagrangian does not contain a given coordinate \(q_{i}\) and the corresponding constraint plus generalized forces are zero, then the generalized momentum associated with this coordinate is conserved. Note that this example of Noether’s theorem applies to any component of \(\mathbf{q}\). For example, in the uniform gravitational field at the surface of the earth, the Lagrangian does not depend on the \(x\) and \(y\) coordinates in the horizontal plane, thus \(p_{x}\) and \(p_{y}\) are conserved, whereas, due to the gravitational force, the Lagrangian does depend on the vertical \(z\) axis and thus \(p_{z}\) is not conserved.
Example \(\PageIndex{1}\): Atwoods machine
Assume that the linear momentum is conserved for the Atwood’s machine shown in the figure below.
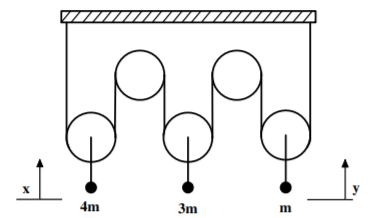
Let the left mass rise a distance \(x\) and the right mass rise a distance \(y\). Then the middle mass must drop by \(x+y\) to conserve the length of the string. The Lagrangian of the system is
\[L= \frac{1}{2}(4m)\dot{x}^{2}+\frac{1}{2}(3m)(-\dot{x}-\dot{y})^{2}+\frac{1}{2}m \dot{y}^{2}-\left( 4mgx+3mg(-x-y)+mgy\right) =\frac{7}{2}m\dot{x}^{2}+3m\dot{ x}\dot{y}+2m\dot{y}^{2}-mg(x-2y) \nonumber\]
Note that the transformation
\[\begin{align*} x &= x_{0}+2\epsilon \\[4pt] y &=y_{0}+\epsilon\end{align*}\]
results in the potential energy term \(mg(x-2y)=mg(x_{0}-2y_{0})\) which is a constant of motion. As a result the Lagrangian is independent of \(\epsilon ,\) which means that it is invariant to the small perturbation \(\epsilon ,\) and thus \(\frac{dL}{d\epsilon }=0.\) Therefore, according to Noether’s theorem, the corresponding linear momentum \(P_{\epsilon }=\frac{dL}{d\dot{\epsilon}}\) is conserved. This conserved linear momentum then is given by
\[\begin{align*} P_{\epsilon } &=\frac{dL}{d\dot{\epsilon}}=\frac{\partial L}{\partial \dot{x}} \frac{\partial \dot{x}}{\partial \dot{\epsilon}}+\frac{\partial L}{\partial \dot{y}}\frac{\partial \dot{y}}{\partial \dot{\epsilon}} \\[4pt] &=m(7\dot{x}+3\dot{y} )(2)+m(3\dot{x}+4\dot{y})=m(17\dot{x}+10\dot{y}) \end{align*}\]
Thus, if the system starts at rest with \(P_{\epsilon }=0\), then \(\dot{x}\) always equals \(-\frac{10}{17}\dot{y}\) since \(P_{\epsilon }\) is constant.
Note that this also can be shown using the Euler-Lagrange equations in that \(\Lambda _{x}L=0\) and \(\Lambda _{y}L=0\) give
\[\begin{aligned} 7m\ddot{x}+3m\ddot{y} &=&-mg \\ 3m\ddot{x}+4m\ddot{y} &=&2mg\end{aligned}\]
Adding the second equation to twice the first gives
\[17m\ddot{x}+10m\ddot{y}=\frac{d}{dt}(17m\dot{x}+10m\dot{y})=0 \nonumber\]
This is the result obtained directly using Noether’s theorem.