
7.4: Rotational invariance and conservation of angular momentum




- Last updated
- Feb 28, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
The arguments, used above, apply equally well to conjugate momenta pθ and θ for rotation about any axis. The Lagrange equation is
{ddtpθ−∂L∂θ}=m∑k=1λk∂gk∂θ(q,t)+QEXCθ
If no constraint or generalized torques act on the system, then the right-hand side of Equation ??? is zero. Moreover if the Lagrangian in not an explicit function of θ, then ∂L∂θ=0, and assuming that the constraint plus generalized torques are zero, then pθ is a constant of motion.
Noether’s Theorem illustrates this general result which can be stated as, if the Lagrangian is rotationally invariant about some axis, then the component of the angular momentum along that axis is conserved. Also this is true for the more general case where the Lagrangian is invariant to rotation about any axis, which leads to conservation of the total angular momentum.
Example 7.4.1: Conservation of angular momentum for rotational invariance
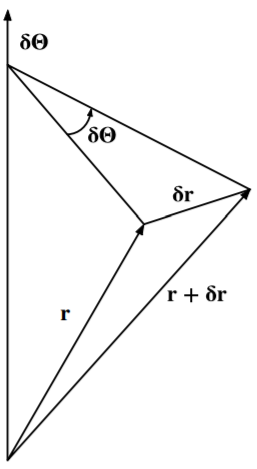
The Noether theorem result for rotational-invariance about an axis also can be derived using cartesian coordinates as shown below. As discussed in appendix 19.4, it is necessary to limit discussion of rotation to infinitessimal rotation angles in order to represent the rotation by a vector. Consider an infinitessimal rotation δθ about some axis, which is a vector. As illustrated in the adjacent figure, this can be expressed as
δr=δθ×r
The velocity vectors also change on rotation of the system obeying the transformation equation which is common to all vectors, that is,
δ˙r=δθ×˙r
If the Lagrangian is unaffected by the orientation of the system, that is, it is rotationally invariant, then it can be shown that the angular momentum is conserved. For example, consider that the Lagrangian is invariant to rotation about some axis qi. Since the Lagrangian is a function
L=L(qi,˙qi;t)
then the expression that the Lagrangian does not change due to an infinitesimal rotation δθ about this axis can be expressed as
δL=∑i∂L∂xiδxi+∑i∂L∂˙xiδ˙xi=0
where cartesian coordinates have been used.
Using the generalized momentum
∂L∂˙xi=pi
then, Lagrange’s equation gives
ddtpi−∂L∂xi=0
that is
˙pi=∂L∂xi
Inserting this into Equation A gives
δL=3∑i˙pδxi+3∑ipiδ˙xi=0
This is equivalent to the scalar products
˙p⋅δr+p⋅δ˙r=0
For an infinitessimal rotation δθ,then δr=δθ×r and δ˙r=δθ×˙r. Therefore
˙p⋅(δθ×r)+p⋅(δθ×˙r)=0
The cyclic order can be permuted giving
δθ⋅(r×˙p)+δθ⋅(˙r×p)=0δθ⋅[(r×˙p)+(˙r×p)]=0δθ⋅ddt(r×p)=0
Because the infinitessimal angle δθ is arbitrary, then the time derivative
ddt(r×p)=0
about the axis of rotation δθ. But the bracket (r×p) equals the angular momentum. That is;
Angular momentum = (r×p)= constant
This proves the Noether’ theorem that the angular momentum about any axis is conserved if the Lagrangian is rotationally invariant about that axis
Example 7.4.1: Diatomic molecules and axially-symmetric nuclei
An interesting example of Noether’s theorem applies to diatomic molecules such as H2,N2,F2,O2,Cl2 and Br2. The electric field produced by the two charged nuclei of the diatomic molecule has cylindrical symmetry about the axis through the two nuclei. Electrons are bound to this dumbbell arrangement of the two nuclear charges which may be rotating and vibrating in free space. Assuming that there are no external torques acting on the diatomic molecule in free space, then the angular momentum about any fixed axis in free space must be conserved according to Noether’s theorem. If no external torques are applied, then the component of the angular momentum about any fixed axis is conserved, that is, the total angular momentum is conserved. What is especially interesting is that since the electrostatic potential, and thus the Lagrangian, of the diatomic molecule has cylindrical symmetry, that is ∂L∂ϕ=0, then the component of the angular momentum with respect to this symmetry axis also is conserved irrespective of how the diatomic molecule rotates or vibrates in free space. That is, an additional symmetry has been identified that leads to an additional conservation law that applies to the angular momentum.
An example of Noether’s theorem is in nuclear physics where some nuclei have a spheroidal shape similar to an american football or a rugby ball. This spheroidal shape has an axis of symmetry along the long axis. The Lagrangian is rotationally invariant about the symmetry axis resulting in the angular momentum about the symmetry axis being conserved in addition to conservation of the total angular momentum.